-
触覚重畳による道具操作支援
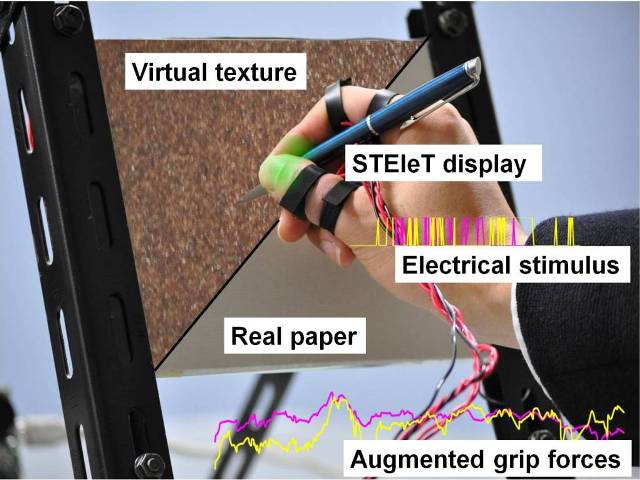
示指と拇指で把持する道具の操作においては,指腹部の触覚が物性の知覚や操作状態の理解に影響する.外科手術をはじめ様々な道具操作において,指腹部への触覚重畳によって操作の状態を通知することで,手技の効率や精度が向上すると考えられる.本研究では,繊細な道具の操作に利用可能な,ユーザビリティの高い触覚提示装置を開発し,実際の手技に応用することを目的としている.従来の触覚提示技術では,触覚を感じる部位と刺激装置を設置する部位が同一であったため,道具の把持や指の操作が妨害されてしまう.一方で本研究では,刺激部位に対して触覚のズレを発生させることが可能な空間透明型電気触覚ディスプレイ“STEleT display”を提案する.特に神経の解剖学的構造と人体の電気的な特性に注目することで,指中節への電気刺激が十分なユーザビリティと触覚提示機能を与えることを導いた.ペン型の道具によるなぞり操作において,仮想的に定義された危険領域への侵入回避に用いたところ,目視できない状況下においても危険領域への侵入回避が可能であることが確認された. [Yoshimoto 2010]
-
多機能歯科情報のための可触化環境構築
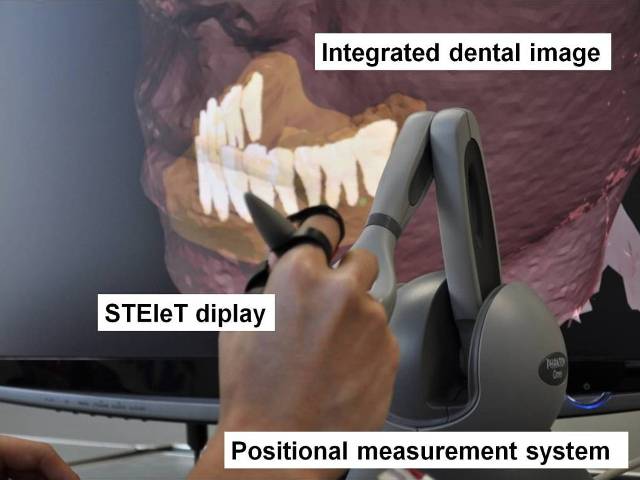
X 線CT やMRI など複数のモダリティの画像を統合し,さらに,ユーザがインタラクティブに操作できるものを多機能画像と呼ぶ.歯科領域をはじめとし,多機能画像の効果的な提示方法には課題が残る.本研究では触覚提示技術を利用した新しい情報提示方法を提案し,体内外の多機能な情報を空間の指示操作により理解可能な可触化システムの構築を目指す.可触化の手法として,三次元歯科形状データ,パノラマ画像,顔形状データを同一の仮想空間上に統合し,解剖学的な情報が投影されたボクセル情報を生成する.触覚提示は指示操作の邪魔にならない,かつ多自由度な情報提示が可能な空間透明型電気触覚ディスプレイを用いて行う.ユーザは指示操作によって指示具を持つ指に解剖学的情報に応じた触覚を知覚することができる.本システムは歯科における診断や,解剖学的構造の学習における新しい情報提示方法として有効性が期待される.
-
多元的歯列情報の融合
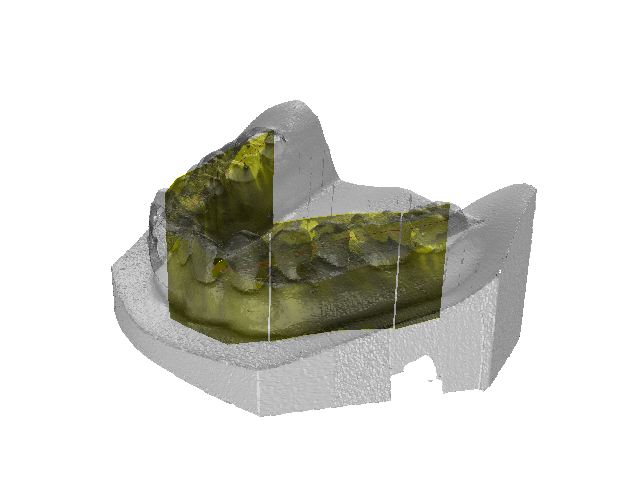
口腔模型を三次元形状計測により計算機内に取り込み,計測された三次元モデル上の歯列位置にパノラマX線画像を投影することで内部情報を付加した歯列三次元情報の提示を行う.形状計測された口腔模型では,歯列と歯茎の識別を行うことが困難であることから,本研究では,口腔内画像から色情報に基づいて各々の歯列部を抽出し,三次元形状データ上に逆投影を行うことで歯列位置を決定する.続いて,パノラマX線画像の画像処理によって得られる各々の歯根の像を,歯列の位置情報が得られている三次元形状データ内に投影する.実験により三次元歯列形状に対し,パノラマX線画像を投影することにより,内部情報を有する三次元形状情報が提示できることを確かめた. [Shigeeda 2011]
-
歯列パノラマ断層画像と表面形状情報の統合による擬似的三次元歯列形状情報の構成
本研究では,口腔情報の可視化を目的として,パノラマ断層画像が持つ歯列形状情報と,口腔模型から得られる表面形状データを統合し,同一空間へ投影することで,顎骨内部の歯根情報を含む三次元歯列形状データを擬似的に構築する手法を提案する.提案手法は,表面形状データから仮想的なパノラマ画像を作成し,取得されたパノラマ画像との一致度を歯の幅に基づく評価関数によって評価することで,パノラマ画像の最適な投影面を決定する.決定した投影面に対してパノラマ画像をマッピングすることにより,両者の同一空間への統合を実現する. [Kaga 2009]
-
形状記憶合金の変位制御による触覚タッチパネル
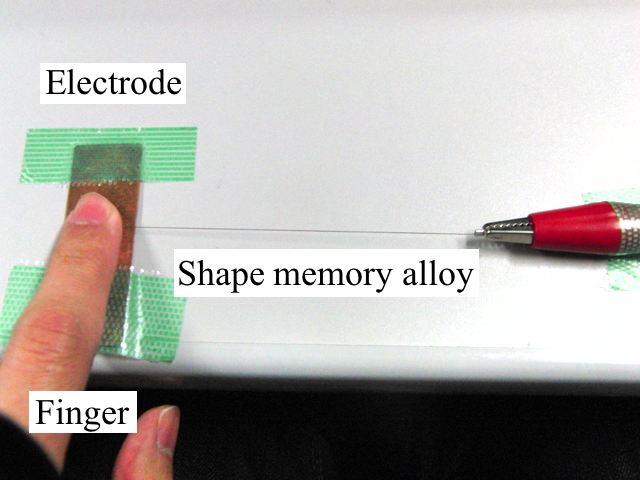
ヒトは物体に触れた際に,物体の表面の粗さ,凹凸などの触覚を知覚する.VRにおいて物体表面の質感を提示する方法には電気的刺激や機械的刺激が存在する.しかし,電気的刺激は皮膚変形を伴わず,機械的刺激に用いられる超音波振動子などのアクチュエータは駆動可能な変位が小さく,皮膚変形による圧覚と振動覚の同時提示は困難であり,実現していない.本研究では,形状記憶合金を用いた皮膚変形と振動覚の同時提示可能な触覚ディスプレイを制作することを目的とする.形状記憶合金の長さを PWM を用いて変化させることで振動と変位を生成する.ワイヤ状の形状記憶合金をスライダに接続し,形状記憶合金に張力を加えることでスライダ上に触覚を提示可能とした.検証実験として,PWMに用いる周波数とパルス幅をそれぞれ変化させ,振動が生成出来ることを確認した.
-
視触覚融合タッチパネル
本研究では,映像の提示部と押し込んだ時の硬さを表現する力覚の提示部を一体化した視触覚融合タッチパネルを開発する.ユーザが映像提示タッチパネルに触れ,押し込んだ場合に,押し込んだ力に応じて接触面積を変化させることによって硬さを提示する.指先の接触面積と反力の関係は,接触面積が決定すれば反力が決定するが,タッチパネル表面の張力を変化させることで等しい反力の時に様々な接触面積に変化させる. [Shigeta 2010]
-
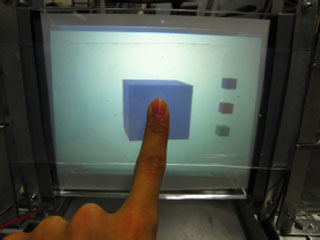
電気刺激パターンによる触覚生成
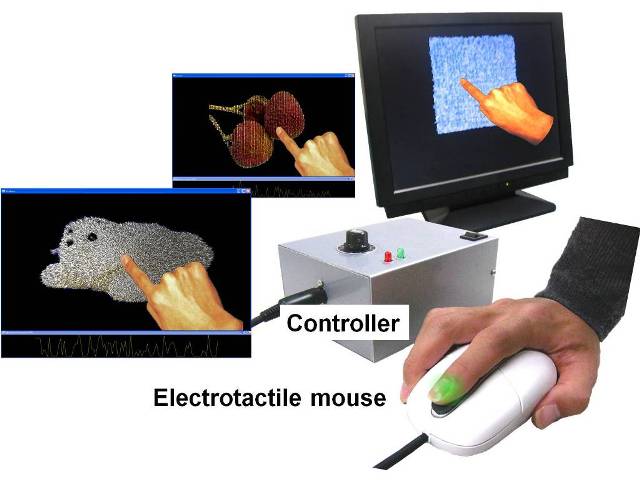
われわれ人間は指で"もの"に触れることで触覚を感じることができる.一方でマウス等に代表されるユーザインタフェースの操作は,仮想的な指による"もの"の操作に相当すると考えられる.ユーザインタフェースの操作に応じた触覚を提示することは,対象の認識率や操作精度の向上に有効であると考えられる.本研究では,人工的な質感提示が可能な小型の触覚提示装置の開発に焦点を当て,電気刺激を利用した触覚の生成方法を提案する.特に任意形状の物体表面のなぞり操作における皮膚変形を特徴化しパルス刺激の周期に反映させることで,一つの陽極刺激電極のみによる質感の表現を可能にした.質感提示の一例として数段階の粗さを有する仮想物体の探索に関して被験者実験を行ったところ,ユーザは仮想物体の形状に応じた粗さの知覚が可能であることが示唆された. [Yoshimoto 2009]
-
ダイラタント流体を用いた力触覚提示システム
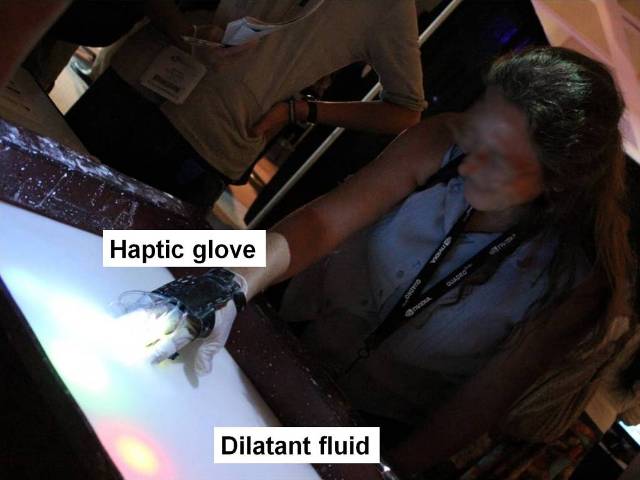
水と片栗粉の懸濁液,ダイラタント流体は外力に応じて固液間の可逆的な変化を示し,力触覚のエンタテインメントを提供する.このダイラタント流体にみられる触覚インタラクションから,ユーザが自由に力触覚の生成・調合が可能なシステムは力触覚の本質的な機能を解明するために有効であると考えられる.本研究では,ダイラタント流体を意図的に制御することで複合的な力触覚を可能にすることを目的として,ダイラタント流体の濃度制御を利用した感覚提示法を提案する.特に,片栗粉粒子のフィルタ及び水の吸入出機構を備えたグローブ型の力触覚提示装置によって流体の状態を制御可能とした.状態が変化した流体の物性に応じて,ユーザは様々な感覚を体験可能である.提案する力触覚提示装置を用いた体験の実施によって,“粘着感”,“硬さ感”,“粗さ感”が提示可能であることが確認された.さらに因子分析の結果,ダイラタント流体を用いた力触覚提示装置によって表面形状・粘性・剛性の三つに相当する物質の物理量を制御可能であることが示唆された.
-
多視点観察可能なフォグディスプレイ
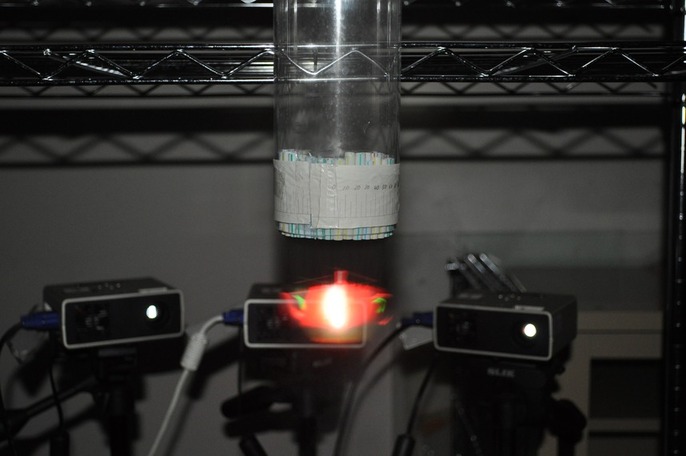
映像表示技術のひとつに空間映像技術がある.空間映像とはスクリーンの存在が希薄に感じられ,空間に映像そのものが存在しているように見える映像システムを指す.空間映像技術においては,画枠が無いなどの性質によって 2D映像を表示しても立体的に見える.空間映像技術のひとつにフォグディスプレイがある.本研究では,観察者の位置に応じた映像が観察できる円筒型フォグディスプレイを製作する.超音波式の霧生成装置で発生させた霧を,円筒形に噴出させたフォグスクリーンに,複数の位置からプロジェクタで映像を投影する.霧は光を前方に強く散乱させるため,観察者の真正面以外から投影された映像は観察出来ない.従って,複数の位置から映像を投影することで,観察者の位置に応じた映像が観察でき,観察者が視点を移動させると運動視差が生じ,立体感が得られる.投影映像はプロジェクタの位置や姿勢に応じて補正した. [Yagi 2011]
-
人体形状のアフォーダンスを利用した体内情報閲覧システム

本研究では,実物大の人体型スクリーンを用いた生体情報の提示環境を構築する.提案システムは,プロジェクタで情報を投影する投影型Mixed Realityディスプレイであり,スクリーンの形状的特徴を利用し,直感的な情報理解を促す.適切なアフォーダンスを提供する押し込み操作,デバイス操作という二種類の操作によって体内情報を閲覧することができる.
-
気泡運動を反映した液体のCGと効果音のリアルタイム生成

映像と同期した効果音はバーチャル空間のリアリティの向上に有効である.本研究では,液体のリアルタイムコンピュータグラフィックスに効果音を自動的に付加する手法を提案する.液体の発する音は液体中の気泡の運動に起因することに注目し,粒子ベースのリアルタイム二相液体シミュレーションによって液体と気泡の運動を計算する.気泡の生成・破裂に合わせてあらかじめ録音しておいた基本となる音を変調・合成して出力することにより効果音の自動生成を実現する.