-
頭部位置姿勢を用いた固視検出法

本研究では画像や三次元形状などのシーン情報を用いずに,頭部の位置姿勢と視線の時系列データから機械学習のみで固視が検出できることを確認した. バーチャルリアリティ環境で取得した視線データから,三次元シーンに拡張したI-DT法による検出結果を教師データとし,機械学習モデルとして1D-CNNを用いた. 実験の結果,精度0.77で固視検出可能であることが分かり従来法であるI-VT法よりも高い精度であることを確認した.
-
再構成可能なフレキシブル回路

本研究では自己修復ポリマーと液体金属を用いることで,自由に構成を変化できるフレキシブルな回路を提案した.この回路の実現に向けて,電気回路の基本的な素子である,抵抗器,コンデンサ,インダクタを作製し,それらの電気特性を評価した.これに加えて,破断した場合でも自己修復性によって素子を修復できることを確認した.
-
導電糸静電アクチュエータによる周期振動の生成
本研究では導電糸を絶縁性のフィルムで覆うことで,糸状の静電アクチュエータを作製した. 本アクチュエータは糸状であることから,服内部の任意の部位に縫い付けて使用者に振動刺激を提示することができる. 本アクチュエータの振動特性を評価したところ,印加電圧の大きさと周波数によりアクチュエータの振動を制御できることを確認した.
-
液体金属を用いた高密度化可能な触覚センサ
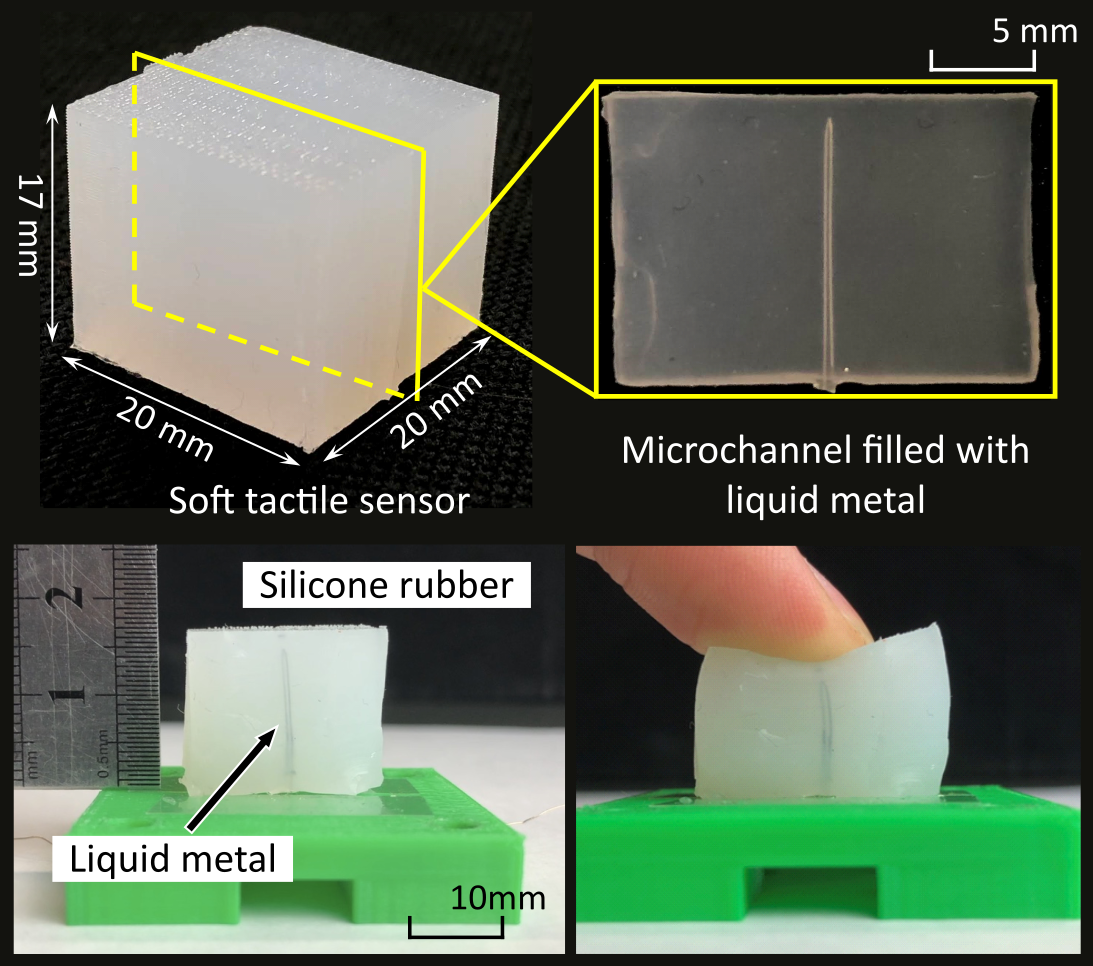
近年,柔軟な素材で構成されたソフトロボットが開発されている.ソフトロボットは,自身の高い柔軟性によって様々な環境に適応することができる.ソフトロボットが周囲の物体の把持や識別を行うためには柔軟な触覚センサが必要である.しかし,柔軟な触覚センサの検出素子を高密度に配置することは難しい.本研究では自由に配置可能な小型の検出素子を備えた柔軟な触覚センサを作製する.液体金属を充填したアーチ状の流路をシリコンゴムの中に垂直に配置して,力を検出する素子として使用する.印加した力によってシリコンゴムが変形し,内部の液体金属流路の断面積と長さが変化する.その際の流路の抵抗値の変化を計測することで力を検出する.流路を垂直に配置した構造によって,幅0.5 mmの小型検出素子を実現した.このセンサは,一つの検出素子が一本の流路で構成されるため,配置や形状を自由に設計して高密度なセンサアレイを作製することができる.
-
気液境界面変位を用いた柔軟な三軸触覚センサ
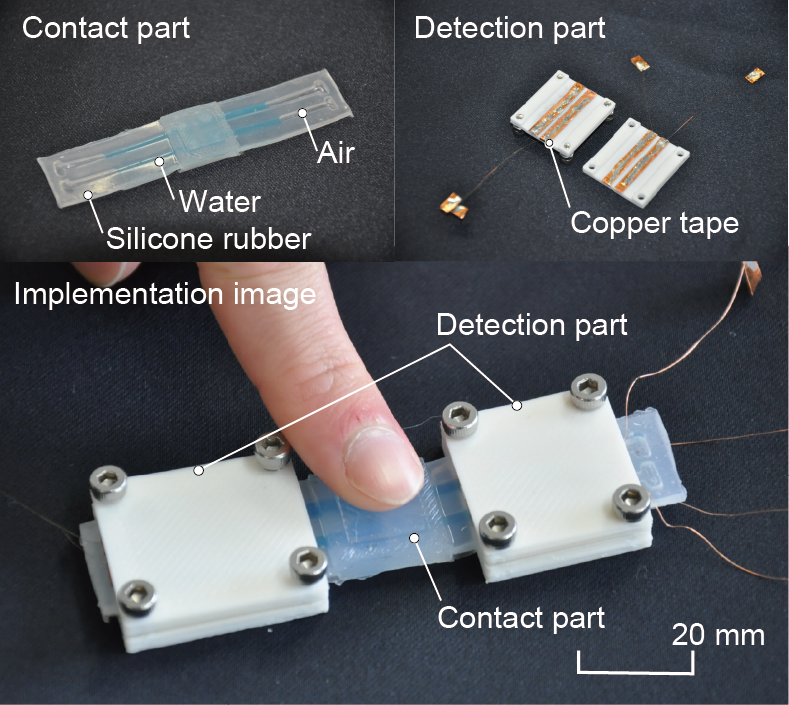
近年,人や周囲環境への親和性が高いソフトロボットの研究が盛んに行われ,産業や医療,人間支援等様々な分野での活用が期待されている.ソフトロボットの制御において触覚センサを用いた触覚計測は重要な要素の一つである. 本研究ではソフトロボットへの搭載を目的とし,柔軟な静電容量型触覚センサを提案した.本触覚センサは,シリコーンゴム内に流路構造が形成され,水と空気が封入されている.触覚センサに力が加わると流路に水が押し出され,気液境界面が変位する,この変位をセンサ外側に取り付けた電極間の静電容量変化として検出し,接触力を計測する.水と空気を利用した接触力伝達機構により,センサの接触部と接触力の検出部とを完全に分離した構造を実現し,触覚センサの柔軟性及び耐久性を向上させた.また,四つの静電容量の変化を組み合わせることで3軸方向の接触力の推定を実現した.
-
筋断裂検知のための適応電気計測
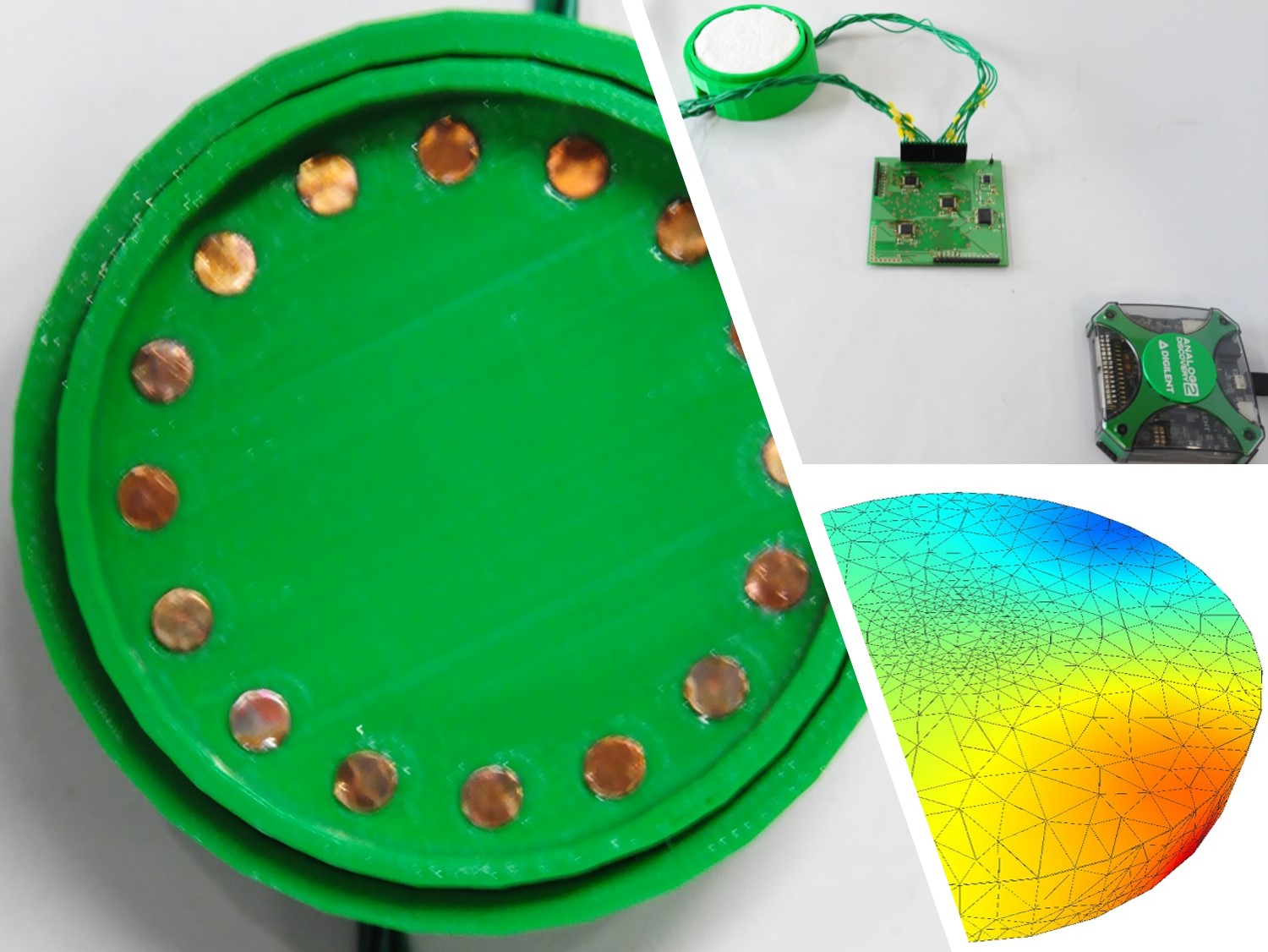
筋断裂(肉離れ)は運動している場所で計測を行い,軽度な段階での検知が望ましい.しかし計測の簡便性が低く,運動している場所での計測が困難である.本研究では簡便な計測が可能な電気を用い,運動している場所でも筋断裂を検知可能なシステムを提案する.断裂時に生じる血腫で体内電気インピーダンス分布が変化するため,体表に電圧を印加した際の電位分布データを判別器に入力し,検知を行う.様々な断裂条件の実測データで学習することは困難であるため,断裂時の電位分布シミュレーションデータで学習を行う.またシミュレーションで断裂前後に大きな電位分布変化が生じる電圧印加位置も決定し,選択的に用いて計測時間の短縮も行う. [Ikemoto 2019]
-
咬筋隆起に基づく咀嚼力推定
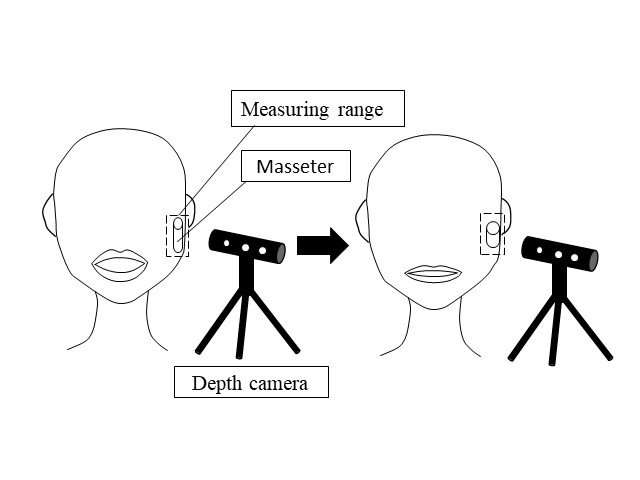
食物を噛み締める際,咬合に関連する筋や顎の骨が強化されるため,摂食時の咬合力を計測する機器の開発が求められている.現在,主な咬合力計測器は口内に入れて利用するため,摂食に影響を与える.本研究では,咬合時,咀嚼筋の一種である咬筋の変形に着目し,咬合力計測が可能なシステムを提案する.深度計測カメラを用いて咬筋上の皮膚表面の変位を計測し,考案した咬筋モデルに入力として与えることで咬合力を出力として得る.口内に計測器を入れないため摂食に影響を与えず,咬合力計測を行う.実際の食事中の咬合力を認知し,日々の食生活を改善することにより咬合力の維持や増強が期待される.
-
非侵襲筋内脂肪量計測システムの開発
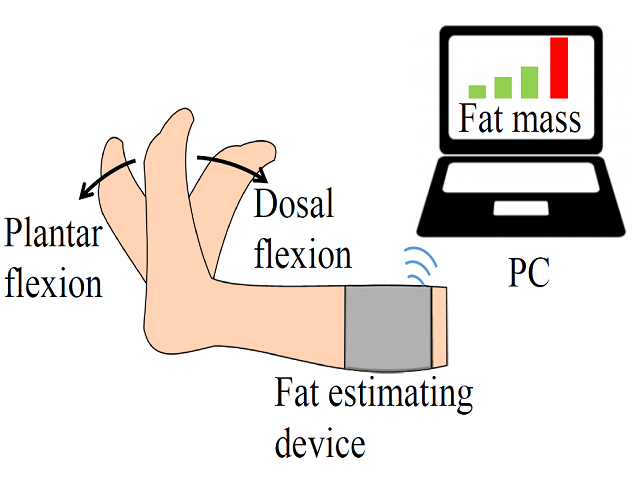
筋内脂肪とは,筋肉中に蓄積する脂肪のことであり,糖尿病を惹起する要因の一つであると言われている.そのため,日常生活の中で筋内脂肪量の計測が可能になれば糖尿病の早期発見に貢献できる.しかし,従来の最も一般的な脂肪計測手法である電気インピーダンス法は筋肉量による影響を受け,高精度な筋内脂肪計測は困難である.そのため,本研究では筋収縮による電気インピーダンス変化を活用することにより,筋量による影響を受けない高精度な筋内脂肪計測システムを開発する.
-
尿糖の時分割二波長無意識計測
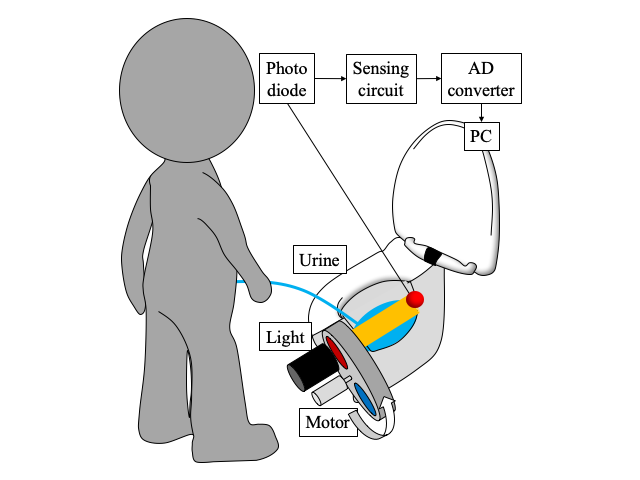
尿糖濃度を日常生活で計測することは,糖尿病の予防や早期発見に有用であり,様々な研究が行われている.しかし,排尿時の動的な光計測は困難であるため,日常生活に普及している計測手法はない.本研究では,波長の異なる二種類の透過光を用いることで,流動状態においても尿糖濃度の計測が可能な手法を提案する.特に,二つの特性の異なる光学バンドパスフィルタを嵌め込んだ円盤をモータにより回転させることで,二波長計測を時分割に行う. [Natsume 2017]
-
皮膚伝播波による把握動作推定
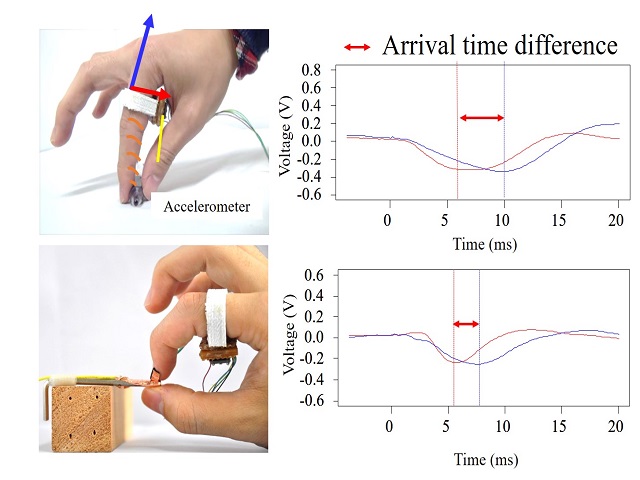
把握動作を観測することは,道具使用時の把握方法の矯正,高齢者の手指の身体機能の評価やリハビリの評価指標として期待される.把握動作の種類により指の接触位置が変化することと物体接触時に速度の異なる波が発生することを利用して把握動作推定を行う.ユーザは右手人差し指基節部に指輪型の3軸加速度センサを装着する.加速度センサから,異なる波成分の加速度の値を記録し,加速度の波形を解析することで到達時刻差を判別し接触位置を推定する.接触位置が明らかになれば,簡便な計測による把握動作推定ができる.
-
血循環からの指先接触力推定
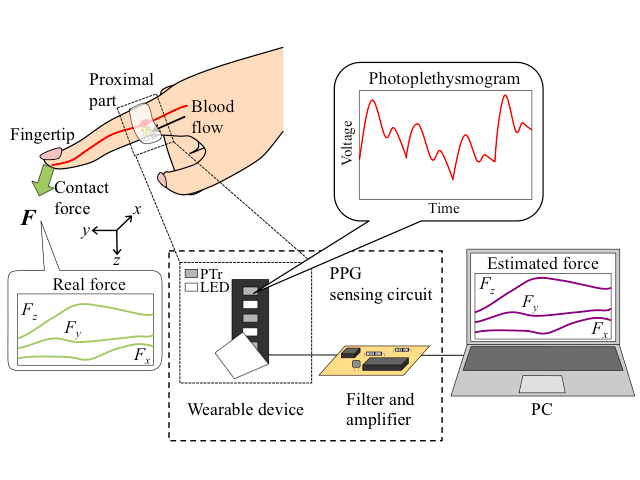
ユーザインタフェースの構築や人間に対する負荷の定量化などへの応用を目的として,様々な指先接触力計測手法の研究・開発が行われている.しかし,その多くの手法は非接触型計測デバイスの計測範囲によりユーザの動作を制限することや,装着型計測デバイスにより力を加える対象や方向が制限されてしまうことなどの問題点が伴う.本研究では,力を加える方向や動作範囲の制限のない三次元指先接触力計測デバイスの開発を目的とする.血液の循環に基づいて,接触動作を行う指先から離れた基節部で計測する光電容積脈波(PPG : Photoplethysmogram)を利用して,ユーザの指先接触力を推定する方法を提案する. [Hinatsu 2017]
-
器具制約下の生体モデリングに基づく非剛体位置合わせ
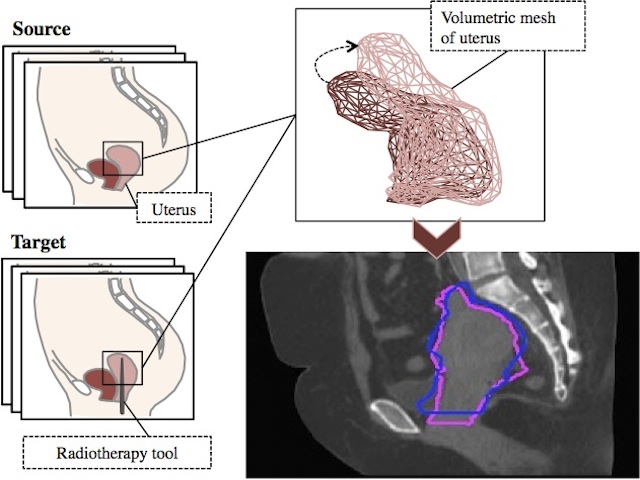
非剛体位置合わせは,適応放射線治療などの様々な医療分野で用いられている.特に,子宮頸がんのための放射線治療では,臓器に器具が挿入された状態で正しい位置合わせの結果を得ることは困難である.本研究では,有限要素法を用いた臓器変形モデリングを輝度ベースの位置合わせに統合する手法を提案し,先述の問題を解決する.提案手法では,器具と子宮の中心線を獲得することによって,画像中の臓器の対応を推定する.人工臓器および臨床画像を用いた実験の結果から,提案手法により位置合わせ精度および解剖学的類似性の向上が可能となることを確認した. [Nadhifa 2017]
-
呼吸機能磁気センシング
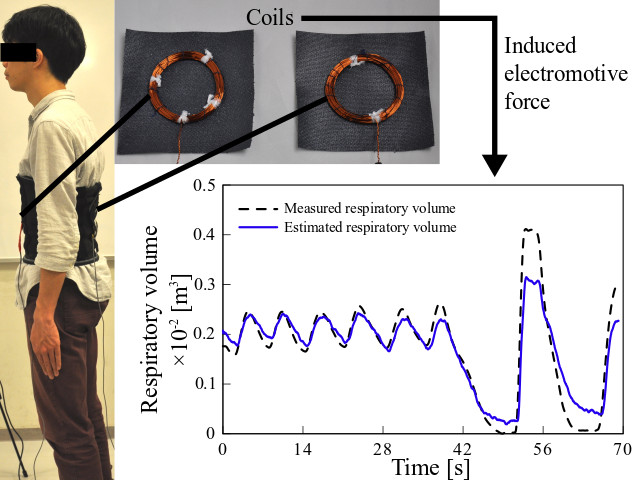
呼吸は生命活動において不可欠な機能であり,呼吸に関する計測によって人体の様々な情報を得ることが可能である.呼吸で取り入れた空気の量である呼吸量や取り入れた酸素の量である酸素摂取量は,運動能力の評価などに用いられるが,従来の手法では運動時や長時間の計測は困難である.本研究では,胸部の腹側,背側に装着したコイル間の電磁誘導を利用して呼吸量や酸素摂取量の計測を行う.呼吸気に非接触な手法を用いることで運動時や長時間の計測が可能であると考えられる. [Kuwatani 2017]
-
特徴追跡に基づく超表情再生
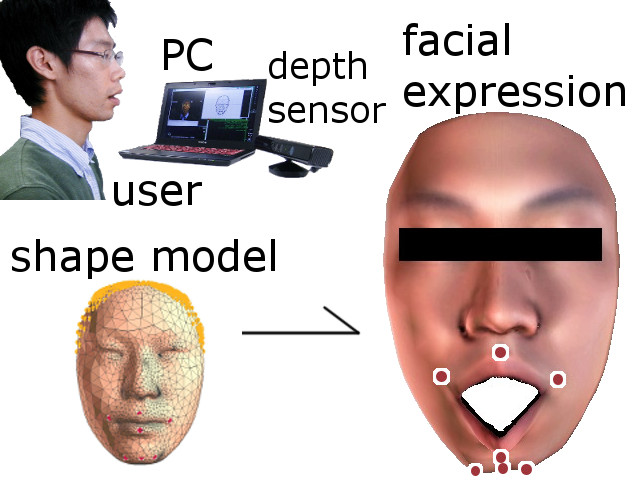
人の表情変化は代表的な感情の身体的表現であり,コミュニケーションにおいて重要な役割を果たす.近年では映像制作などにおいて,計測した役者の表情に基づき作製されたCGが利用されるなど,CGでの表情の再現が実用されているが,計測に特別な機器が必要である.本研究では,商用の距離画像センサを用いてユーザの表情変化を計測し,事前に作成した顔の三次元形状モデルをユーザの表情変化に基づき変形させることでコンピュータ上での表情の再現を行う.本手法では,形状モデルの変形に皮膚の変形シミュレーションを用いる.シミュレーションでは皮膚を粘弾性体と考え,有限要素法を用いて変形を計算する.表情のシミュレーションでは表情筋による作用が重要であるが,計測したユーザの表情を形状モデルの変形に利用するため,筋モデルを構築する必要なく表情の再現を行うことが可能であると考えられる. [Kato 2017]
-
外耳道の形状変形に基づく咬合力推定
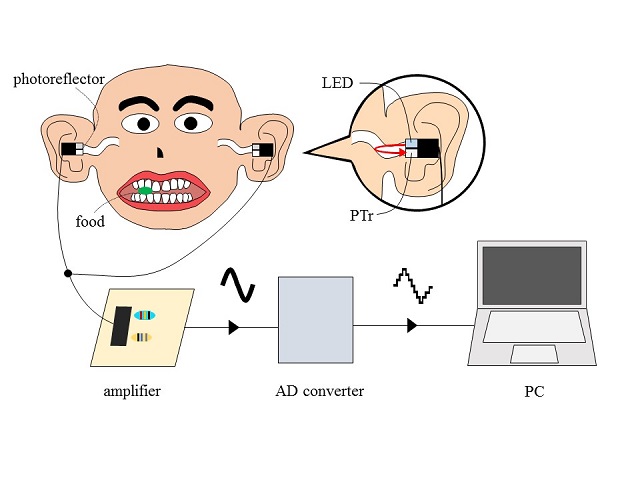
食の軟化により食物などを噛みしめる力とする咬合力が低下している.咬合力低下の早期発見のための精度の高い咬合力計測器が必要であり,本研究では両耳に装着したフォトリフレクタにより咬合時の外耳道の形状変化を計測することによる咬合力推定システムを提案する.右大臼歯部,右小臼歯部,中切歯,左小臼歯部,左大臼歯部の5箇所の咬合力を両耳のフォトダイオードの電気信号を基に多重線形回帰モデルに基づいて推定する.実験では全ての推定部位において誤差25%以下となり,咬合力が推定できることが確かめられた.
-
ライトフィールドカメラを用いた透明物体表面形状推定
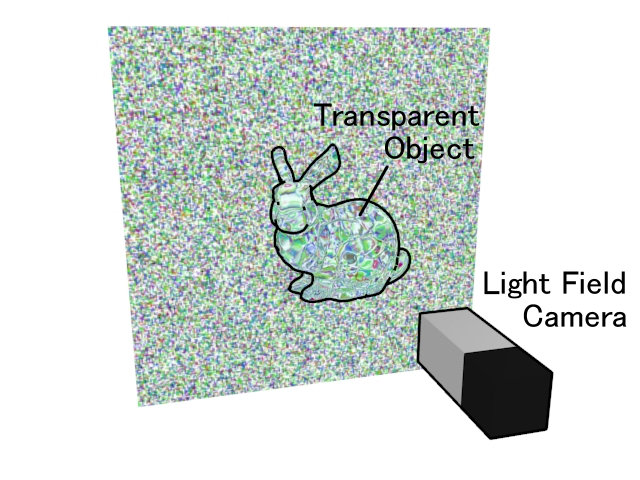
コンピュータビジョンの分野において透明物体の表面形状計測は未だ難しい問題の一つである.本研究では,透明物体を輻輳角の小さい複数のカメラで撮影した際に生じる辺縁での光学的部分恒常性を利用して,透明物体の表面形状を推定する手法を提案する.提案手法では,輻輳角の小さい複数のカメラで撮影した場合に得られる画像を生成可能であるライトフィールドカメラを用いる.ランダムパターンの前に配置した透明物体をライトフィールドカメラで撮影し,ステレオ視を用いて透明物体の表面形状を推定する.
-
外耳道パルスエコーによる個人認証
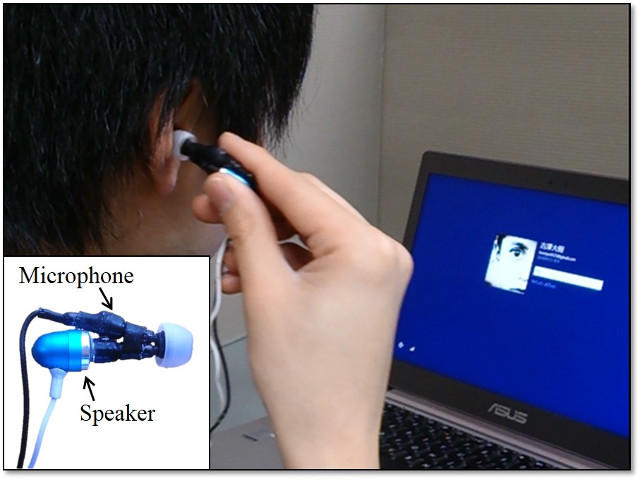
イヤホンにより音響的な生体特徴を取得することができれば,PCや携帯端末,音楽プレーヤなどにおける簡便な個人認証が可能となる.本研究では,外耳道の幾何的特性や力学的特性に着目し,スピーカとマイクを兼備したイヤホンを用いて,インパルス信号を再生し,その反響音を計測するという,外耳道パルスエコーによる個人認証システムを構築する.提案手法では,パルスエコーの時間領域と周波数領域から計10個の特徴量を抽出し,認証に利用する.20名の被験者に対して認証評価を行ったところ,96.0%の精度が得られることが確認された. [Furusawa 2016]
-
手首変形に基づく指運動推定
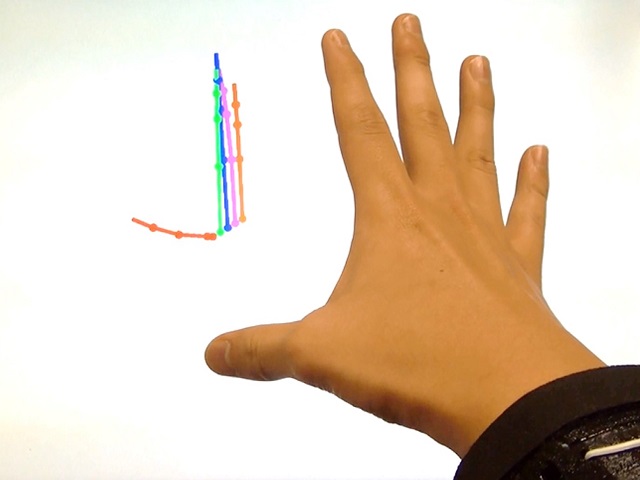
手指の運動計測はバイオメカニクスやヒューマンコンピュータインタフェースに関する研究などに有用である.従来手法の計測環境やユーザの動作を制限する問題を解決するために,本研究では,手指の運動時に筋肉や腱などが連動して生じる手首の変形に基づき,ユーザの手首から手指の運動推定を行う.提案手法では,手首に装着した計測デバイスを用いて,手指の運動時の手首の変形によって生じるデバイスと手首の皮膚の接触面積の変化を接触抵抗の変化として検出する.接触抵抗に応じた出力電圧と指の関節角度の重回帰モデルを使用し,計測した出力電圧から手指の運動を推定する.16 個の電極を配置したデバイスとデータグローブを用いて重回帰モデルのパラメータを算出し,出力電圧から指の関節角度を推定するシステムを作製した.全ての指を同時に動かした際,平均20-35 deg の誤差で実際の指の動きに則した指の各関節角度の和を推定できることを確認した. [Kawaguchi 2016]
-
大口径液体レンズの開発
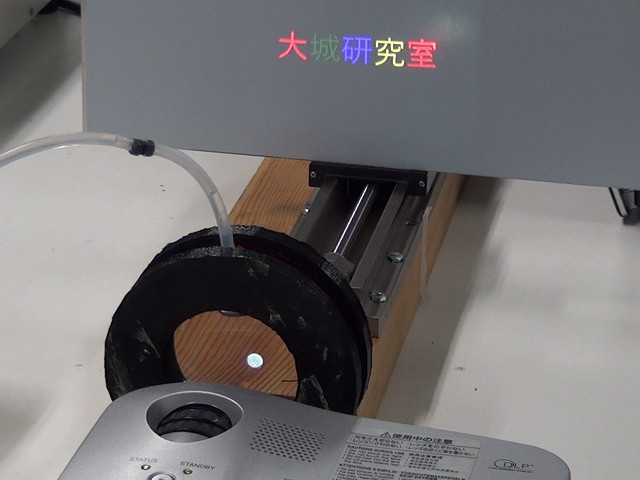
液体を用いた可変焦点レンズの研究は,レンズシステムを簡易化するために行われており,撮像機器だけでなく,プロジェクタなどの投影機器にも応用されている.液体レンズを搭載したプロジェクタは焦点を動的に高速に変化させることができ,被写界深度を深められるが,現状の液体レンズではプロジェクタに用いるには口径が小さい.本研究では,プロジェクタへの応用を目指す大口径液体レンズを開発することを目的とする.大口径液・フレンズでは焦点を高速に変化させることが難しい.提案手法では,ポンプを用いることで口径60 mmの液体レンズの焦点距離を高速に変化させる.シリンジポンプを用いて液体レンズを駆動したところ,最大で1.11 m/sの速度で駆動することができた.今後,数理的に焦点変化をモデル化し,焦点距離を任意に調整可能とする.
-
皮膚水分量加振センサ
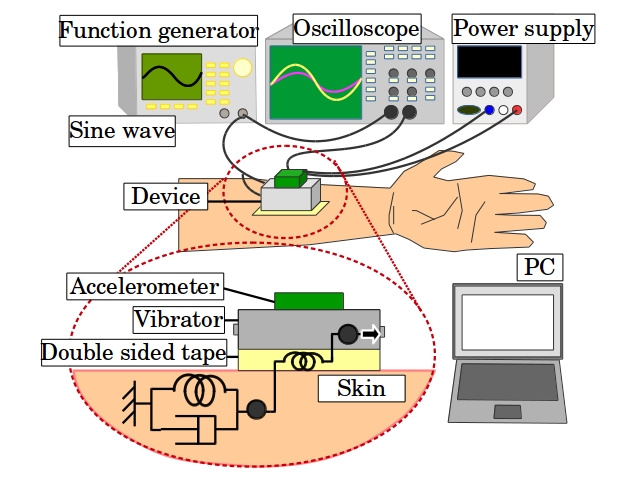
皮膚健康状態を知ることは医療分野や化粧品分野で重要であり,定量的指標として皮膚水分量がある.本研究では,皮膚を機械的に振動させることで皮膚水分量を推定する手法を提案する.皮膚粘弾性が皮膚水分量に依存することに着目し,皮膚を蓄勢器と制振器,及び質点の三要素で皮膚粘弾性体としてモデル化した。皮膚粘弾性により減衰した振動加速度とモデルの運動方程式から各係数を計算し,さらに皮膚水分量を推定した.実験では二乗平均平方根誤差6.42 %の精度で皮膚水分量を推定できることが確かめられた. [Mataga 2015]
-
相補的口唇トラッキング
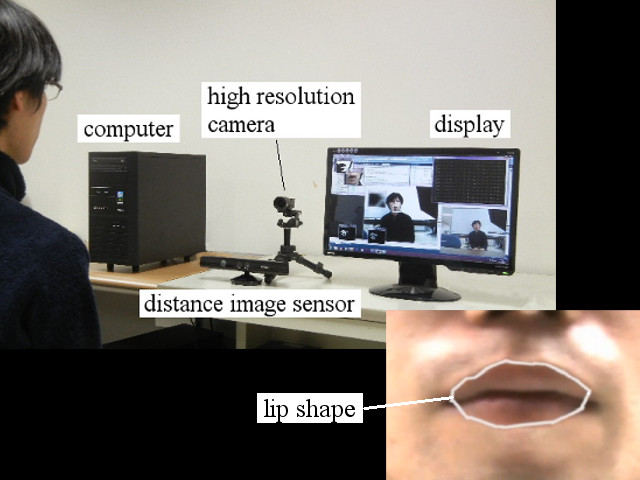
口唇動作は発話と深い関係があり,口唇動作を用いた読唇や発話習得支援など様々な・、究が行われている.口唇動作に関する研究では口唇動作に対応可能な口唇形状計測が必要であり,ユーザの動きを制限し口唇のみを撮影する計測手法が広く用いられる.ユーザの動きを制限しない口唇動作計測では画像中の口唇領域を推定する必要があり,撮影する画像の解像度の増加に伴い計算時間が増えるため,精度と計算時間を両立させることが難しい.本研究では,精度の高い計測に用いる高解像度カメラに加え距離画像センサを用いる相補的口唇トラッキングを提案する.実験を行った結果,カメラのフレームレートである30 fpsに対して充分な計算速度で口唇領域を抽出することが出来た. [Kato 2015]
-
触覚情報のスマートセンシング
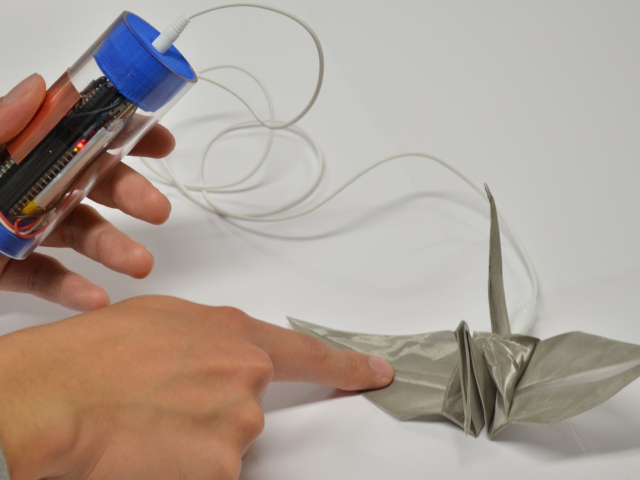
身体と物体の間に働く力の計測は,触情報に関わる動作解析や,入力インタフェース,接触構造解析などにおいて広く必要とされてい・驕Dしかし,機械的な拘束を与えずに接触に伴う力を計測することは難しい.本研究では,皮膚と物体の接触抵抗に着目し,精度と安定性の良い電気的な力の計測手法を提案する.提案手法を較正された力覚センサを用いて評価した結果,分解能0.1 N・ダイナミックレンジ54 dBの良好な計測性能が得られることが確認された.
-
爪色力センサ
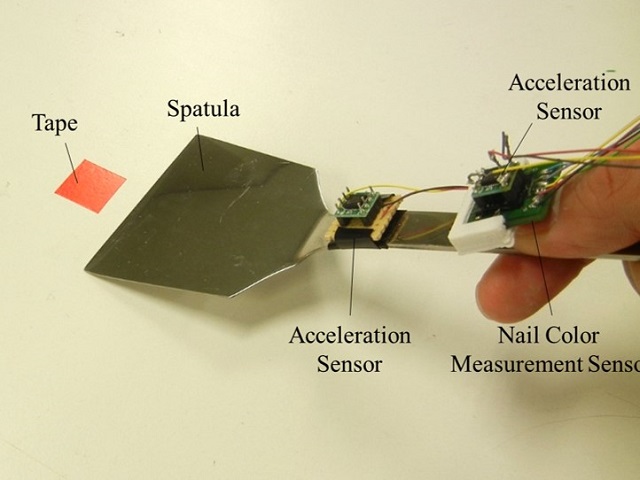
本研究では,爪の各部位の色が指腹部に加わる力の大きさや方向に応じて赤から白まで変化することに着目して,爪色から指先接触力を推定します.デバイスには三つのLED,四つのフォトダイオード,加速度センサが組み込まれており,LEDとフォトダイオードで爪色の計測を行い,加速度センサで指姿勢の推定を行います.本手法に・謔闔w腹部と対象物の間に機器を装着しない力計測が実現可能となり,様々な道具操作時の指先接触力計測に応用できると考えられます. [Mameno 2015]
-
嚥下音による飲水量モニタリング

嚥下を行う際に喉頭において発生する嚥下音は,体の外側から非侵襲的に計測することができるため,嚥下障害等の検査への応用が期待されている.しかし,嚥下音を利用して飲食物の嚥下量を定量的に計測する研究は少ない.本研究では,嚥下音に対して信号処理を行うことで,ユーザがどの程度の水分を摂取したかを定量的に計測するシステムの構築する.嚥下量の計測が可能となれば,食生活のモニタリングによる疾病の予防等へ応用されることが期待される. [Nakafuji 2015]
-
視覚障がい者のための衣類の色および模様提示システム

本研究は視覚障がい者の自立生活と社会参加を促すために精神的な支援を目的とし,外出時などに自らの衣服の色情報を知り,身に着けるものを自分で選ぶことができるシステムを開発する.システムはカメラで画像を入力し,コンピュータで情報を処理して色と模様を音声出力する.手軽に利用できるようにスマートフォンにこのシステムを実装する.色の認識で重要な点は光源である.照明光を内部に設置した覆い付きシステムと,覆いを用いない環境光利用システムの 2 通りの手法を開発した.評価実験の結果,いずれも出力の精度は良好で,実用に供することが可能である.
-
GPUによるラスタセグメントを単位とした画像連結領域ラベリング

画像の連結領域抽出は,画像のラベリングとも呼ばれ,入力画像中の連結した画素の集合を検出し,同じ連結領域に属している画素に同一のラベルを与える処理である.連結領域抽出は画像を解析する前段階の処理として,コンピュータビジョン,パターン認識,画像処理などの分野で幅広く必要とされている.本研究では,連結領域抽出処理を,画像のラスタ上における同一値の画素の連なり(ラスタセグメント)の抽出と,抽出されたラスタセグメントの連結に分割し,GPGPU(GPUによる汎目的計算)の専用開発環境であるCUDAを用いて高速に並列実行するアルゴリズムを提案する.
-
極小RFIDタグを用いた内視鏡手術支援マーキングシステム
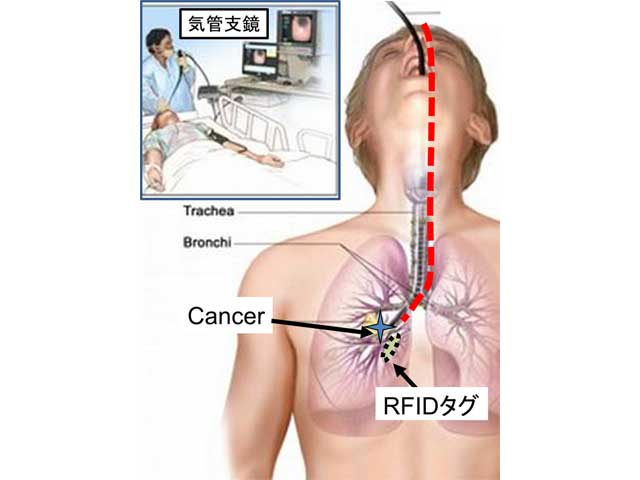
本研究は,内視鏡手術支援技術であり,術者が視認・触知できない腫瘍位置を,RFID(Radio Frequency IDentification)の無線信・・畑縺�※菴咲スョ諠�を術者に示す.現在は肺腫瘍が対象であり,1mmのRFIDタグを,気管支鏡で肺の内側から肺腫瘍近傍に留置し,術時に無線信号を解析することで目的の位置推定を可能にする.切除予定範囲の予測が容易となり,腫瘍位置および範囲をより正確に術者に提示することで切除範囲を最小化し,患者の負担を減らすことを目指す. [Takahata 2014]
-
Light Field Consistencyによる煙霧体濃度推定
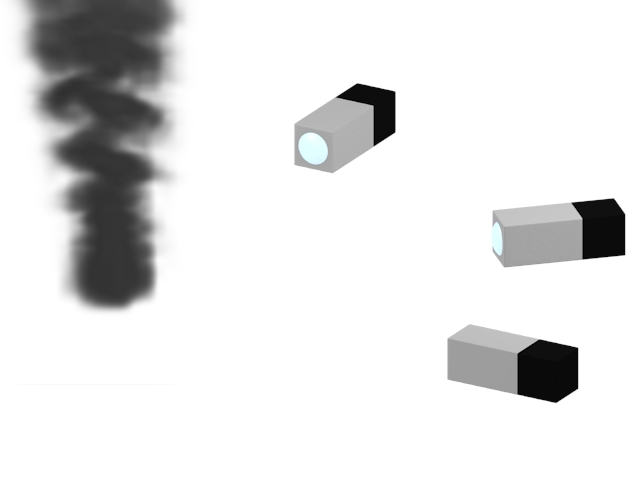
煙,霧,炎などの煙霧の三次元の空間濃度分布を知ることは,エンジン噴霧火炎内における現象理解や,煙による空気の流動の可視化などに有用である.しかしながら,空間的な濃度分布を推定する手法はいまだ確立されていない.そこで本究では,煙,霧,炎などの煙霧体の空間濃度分布を推定することを目的とし,任意の距離にピントを合わせた画像を生成可能であるライトフィールドカメ・奄いた三次元濃度分布手法を提案する.本手法は,複数台のライトフィールドカメラにより煙霧体が存在する空間を撮影し,得られた画像からピント面の異なるリフォーカス画像群を作成し,そのリフォーカス画像間の関係から,三次元の濃度分布を推定する. [Ideguchi 2014]
-
触動作による弾性マッピング
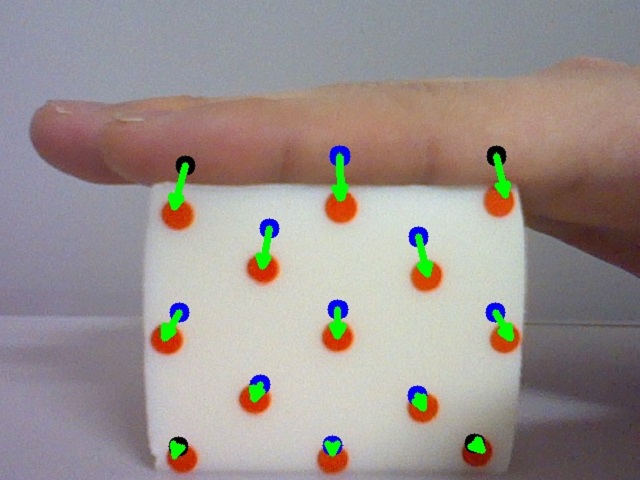
本研究では生体信号の一つである筋電位を用いた,触動作による物体の弾性マッピングシステムを提案する.筋電位から推定した筋の張力とカメラで計測した物体の変位を用いて物体の弾性分布を推定することで,人の手で物体に直接触れる動作によって物体の弾性を定量的に推定し,表示するシステムを構築する.触・ョ作は人が日常的に行う動作であるため,本システムによってユーザは簡便に弾性分布を知ることができる.本システムを用いて実験を行い,弾性率の異・ネる二種類の素材で作製された物体の弾性分布を推定した.実験の結果,全体の約61%の要素に正しい弾性率を割り当てることができ,物体内部の素材の違いを確認することができた. [Kawaguchi 2014]
-
碁盤構造のネスティングナビゲーション
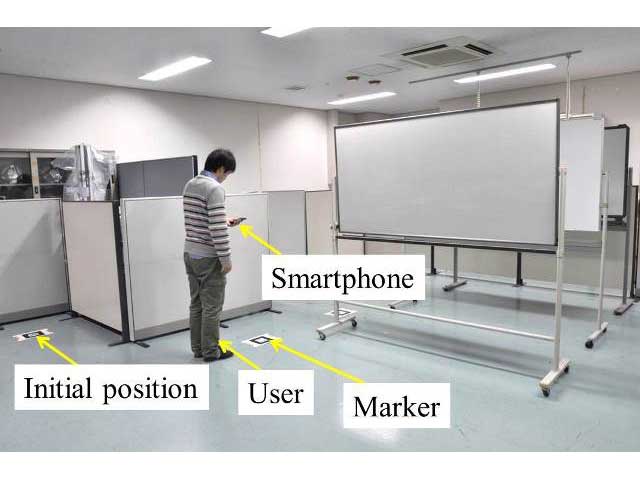
屋内でのナビゲーションシステムは,広く知られるGPSを用いることができないため,実現が困難なものとなっている.本研究では,棚や通路の配置が碁盤構造を有し,さらに,物品が階層的に分類されて並ぶネスティング構造を持つ図書館や倉庫といった屋内環境を想定し,ユーザを目的の物品の周辺まで誘導するナビゲーションシステムを提案する.システムはスマートフォンと二次元マーカを用いて・タ現した.被験者実験によって,本システムを用いることでより早く目標を発見することができることが分かり,図書館や倉庫での実用的なナ・rゲーシ・潮蝪之繧ケ繝�Β縺ィ縺励※蛻ゥ逕ィ蜿ッ閭ス縺ァ縺ゅk縺薙→縺檎、コ蜚�&繧後◆. [Nakafuji 2013]
-
コラーゲンMRイメージング
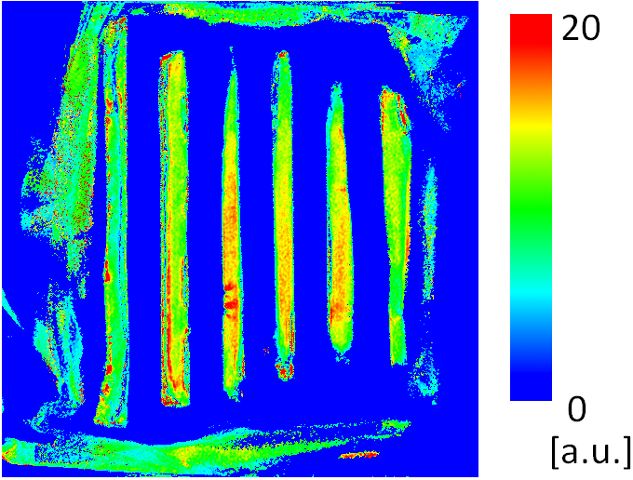
跳躍や走行中に起きるアキレス腱断裂は,スポーツ選手の選手生命において致命的であり,医用画像による非侵襲的な兆候把握が期待されている.しかし従来の画像化手法は,特殊な機器を用いる必要があること,画像のコントラストが不十分であることなどの問題があり,断裂前の微細な損傷は描出できない.MRI計測において,腱や靭帯といった均一な線維配列をもつ計測対象の信号強度は,静磁場方向に対する角度に依存して変化することが知られている.本研究では,計測信号の角度依存性を利用して,アキレス腱組織の損傷部位を可視化する手法を提案する.提案手法は,静磁場に対する角度を変化させながら撮像した複数枚のMR画像から取得される信号強度データと信号強度の角度依・カ性の理想曲線より,維配向性をあらわす数値を求め,画像化する. [Tokui 2011]
-
血圧推定のための生体計測マットの構築
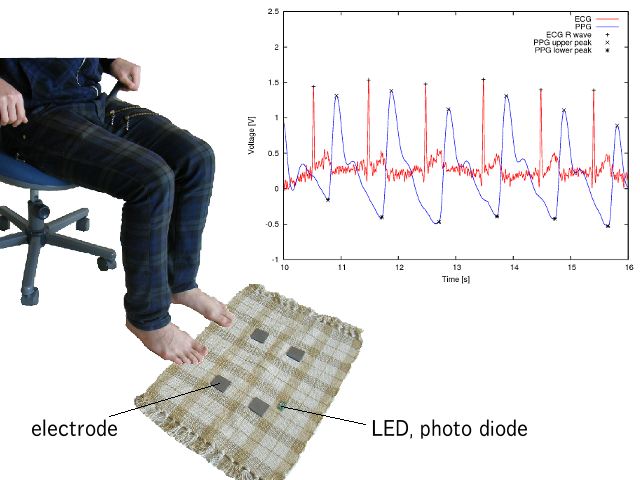
本研究では,足底より生体情報が取得可能な,マット型の生体計測システムを提案する.生体情報として,心血管系の指標となる心電図,光電容積脈波を選択した.計測システムは,マット,アナログ回路,AD変換器,PCで構成される.計測システムを構築し,被験者実験を行ったところ,心電図,光電容積脈波を足底より取得することに成功した.また,取得した心電図,脈波を用いて動脈硬化の指標として知られる脈波伝播速度を算出した.血圧との同時計測により解析を行ったところ,本システムを用いて算出した脈波伝播速度と血圧に相・ヨを認めた.したがって,本システムを用いることで,日常的に不整脈だけでなく,動脈硬化や血圧を推定できる可能性が示唆された.
-
アームレスト型生体信号計測デバイス
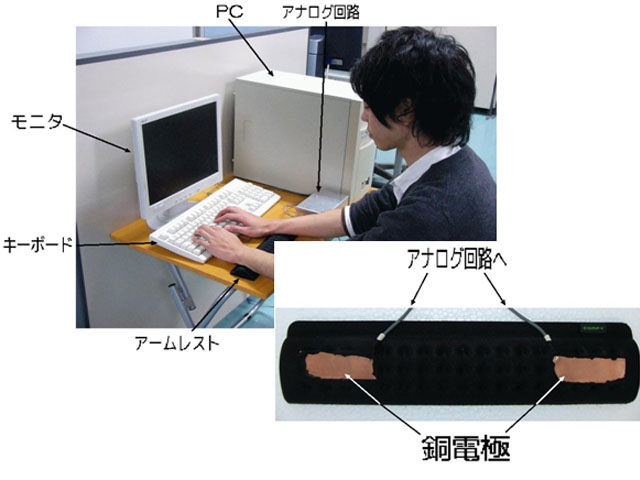
本研究では,近年オフィスでのデスクワークや,家庭でも使用時間が増えているPCの使用中に,無意識・無拘束で心電計測を行うことを目的とし,アームレスト型生体信号計測デバイスを作成する.アームレストに備えた電極からの信号を処理することにより,正確な心電計測とユーザの打鍵状態の検出が可能となった. [Tokui 2009]
-
超解像ローカルトモグラフィ
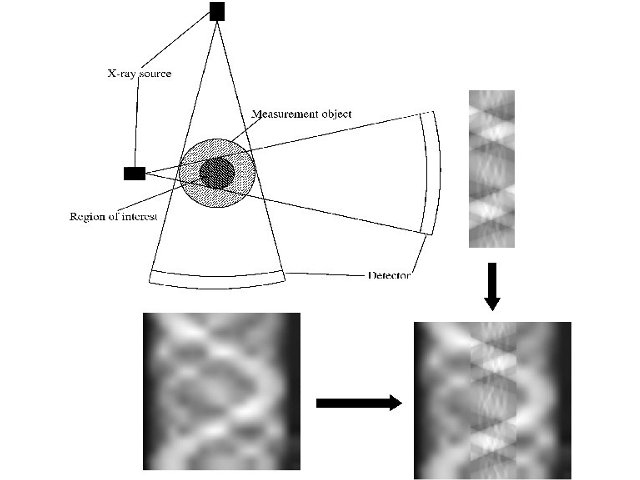
計測技術の発展により,物体内部を非破壊で観察することが可能となった.中でもX線CTは高空間分解能を有する計測手法として,生体や機械材料の内部観察に利用されている.しかし,検出の際に被写体の全域をX線が通過する必要があり,空間分解能は計測対象の大きさに依存する.被写体より狭いビーム幅による再構成手法であるローカルトモグラフィが研究されており,関心領域境界での値を用いて,外部補正を行う手法等が提案されている.しかし,関心領域外部にX線吸収係数の大きな物体が存在する場合は,致命的なアーチファクトが発生する.本研究では,高空間分解能を有する局所的な投影データに対して,低空間分解能な被写体全域の投影データを用いて補正処理を施す手法を提案する.この手法により,被写体よりX線ビーム幅が非常に小さい場合でも,アーティファクトの少ない再構成画像を取得可能となる. [Suetake 2011]
-
ディジタル耳目音声抽出
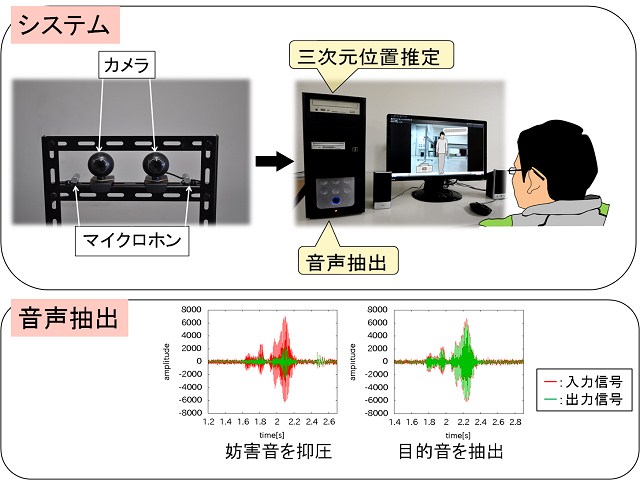
近年,音声認識機器への入力や,雑音環境下でのコミュニケーションなどで,聞きたい音声だけを聞くという音声抽出のニーズが高まっている.本研究では,音源の位置に応じた音声抽出を行うことを目的とする.提案するシステムでは,ステレオカメラと2ch マイクロホンアレイを用いる.まず,ステレオカメラと2ch マイクロホンアレイでそれぞれ画像と音声を取得する.次に,ユーザが画像上で音源を指定し,指定された音源の位置をステレオ位置計測によって取得する.取得した音源位置に応じた差分型ビームフォーマによる雑音抑圧を行い,結果をスピーカから出力する.本システムでは,ユーザが音源を指定している間,指定した音源の発する音声を出力することができる. [Wakamatsu 2011]
-
加速度センサを用いた斜視内視鏡のカメラモデル推定
AR内視鏡手術支援システムでは術中に撮影される実画像にあらかじめ生成しておいた臓器の三次元モデルを重ね合わせて表示することで手術の支援を行う.三次元モデルの重ね合わせを行うためには,内視鏡の位置姿勢を求めることが重要である.内視鏡の種類のひとつに斜視内視鏡が存在する.斜視内視鏡を用いる際,鏡筒の回転により内視鏡の光軸の向きが変化する.したがって内視鏡の視線方向を推定するためには,内視鏡の姿勢に加え鏡筒の回転角を求める必要がある.本研究では光学マーカと加速度センサを用いることでカメラヘッドに対する鏡筒の回転角の大きさを求めた.加速度センサは重力方向を検出する.鏡筒の回転角の大きさは重力方向の変化をもとに計算される.さらに,本システムでは内視鏡の動作判定を行ない,内視鏡の運動による加速度の影響を考慮した.
-
解剖直線形状を用いた内視鏡手術支援システム
本研究では,体内において特徴的かつ計測が容易な直線形状を利用することで,術前のX線CT撮影により得られ・ス体内の形態情報を,術中の画像に幾何学的な整合性高く重畳表示する手法を提案する.提案手法では直線であると仮定できる体内の大血管上の二点をポイントするだけでロバストな位置合わせが可能である.腎臓摘出手術において提案手法による支援を行い,臨床において本手法が適用可能であることが示された.
-
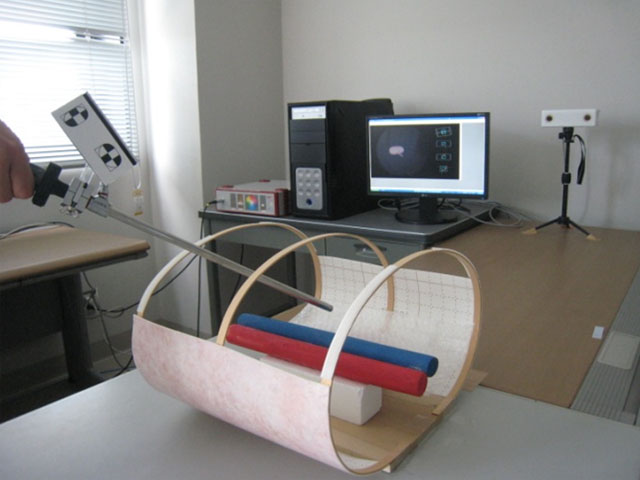
自己回帰モデルを用いた呼吸音分類
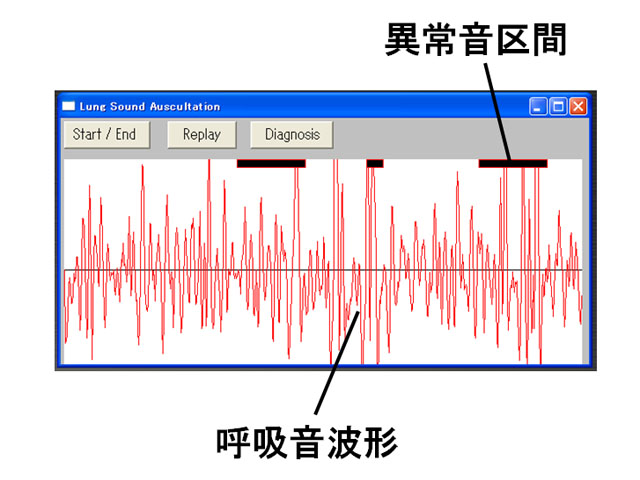
本研究では,呼吸音の客観的な解析を目的として,呼吸音中から副雑音区間のみを正確に検出し,呼吸音を疾病/正常に分類する手法を提案する.提案手法では,正常呼吸音から抽出した自己回帰パラメータに基づく逆フィルタを,入力呼吸音に対して適用し,入力呼吸音中から副雑音の可能性のある区間のみを抽出する.次に,時間周波数解析による特徴抽出を行うことにより,喘鳴などの連続性ラ音区間を検出する.連続性ラ音が検出された呼吸音を疾病と判定する.
-
近赤外光を用いた呼吸計測
本研究では,無拘束・非侵襲で呼気を計測する手法を提案する.呼気には水分が大量に含まれることと,水が近赤外帯に吸収を持つことに着目し,近赤外LEDとフォトダイオードの組を利用して計測を行う.