-
網状像の重畳による半透明立体視表現法
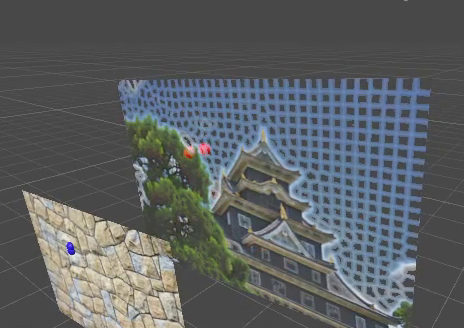
AR x-ray visionやGhosted viewなどと呼ばれる技術は、拡張現実感技術を用いて、隠蔽関係下の二つの物体の位置や特徴を利用者に提示する技術である。 利用者が物体を注視する動作により生じる両眼の輻輳角の変化にもとづき,物体の透明度を一様に抑制する従来手法では、注視層の視認性と切り替え精度の高さは単純には両立できないという問題があった。 本研究では、隠蔽関係下の物体のうち、注視している物体の層(注視層)に加え、注視していない物体の層(非注視層)を不規則な網状模様にし、視認性の高さと切り替え精度の高さを両立する手法を開発した。
-
光学透過型ディスプレイにおける最適仮想影生成

従来,光学透過型ヘッドマウントディスプレイ (Head Mounted Display; HMD) において,影領域周辺が高輝度な仮想物体(Shadow Inducer) を用い,相対的に影領域を暗く感じさせることで仮想影を表現する手法が提案されている.しかし,この手法では,Shadow Inducer の輝度や形は経験的に定められており,影の形や実シーンの背景模様に応じて,現実感の増した仮想影を表現できる余地を残していた.本研究では,様々な実シーンであらゆる形の仮想影を表現するために,明度知覚モデルを用いた最適化により Shadow Inducer を生成する手法を開発した.開発した手法では,明度知覚モデルとして,任意の視覚刺激パターンに対する明度を予測する OrientedDifference of Gaussian (ODOG) モデルを用いた.ODOG モデルにより,Shadow Inducer で表現する仮想影と目標影に対して知覚される明度画像を生成し,両画像 の類似性が高くなるように最適化した.実験では,Shadow Inducer の最適化変数が512 × 512 個に対し評価関数値が約 30 まで収束し,2 種類の実シーンと影の形状でShadow Inducer を生成できることを確認した.
-
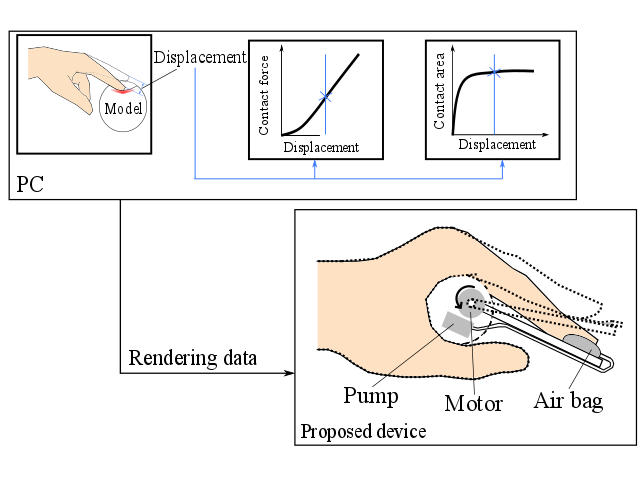
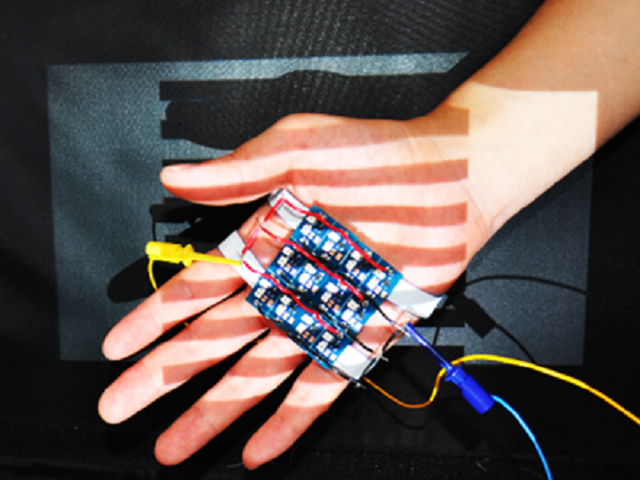
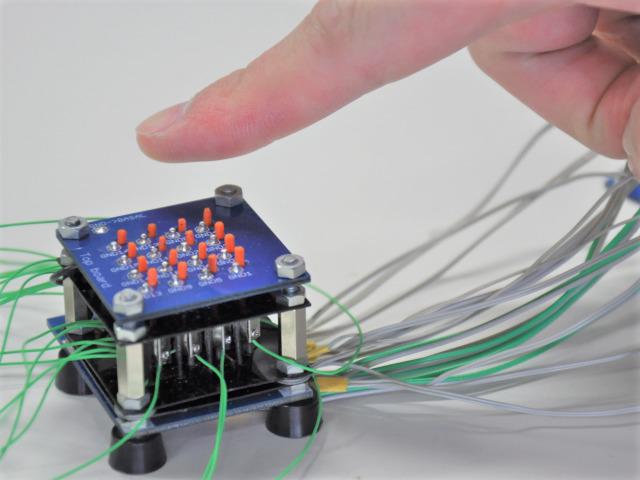
接触力・面積の独立制御による動的硬軟ディスプレイ
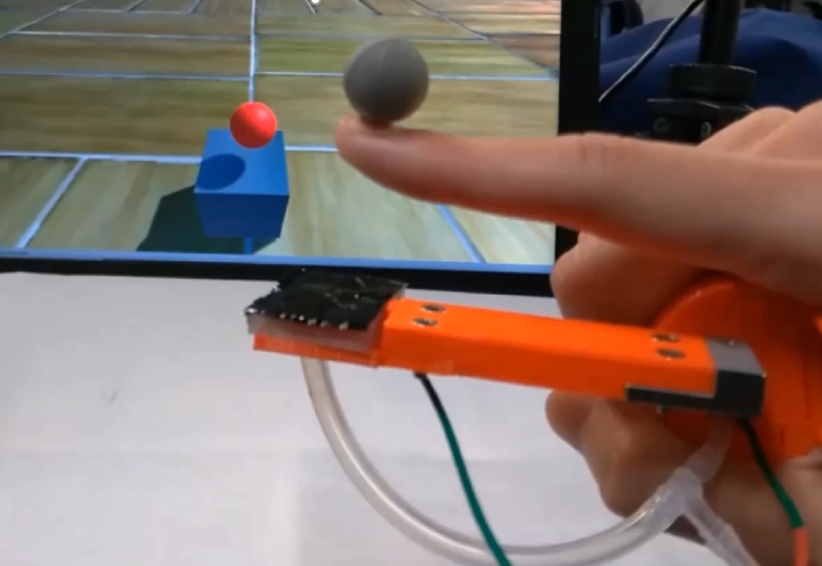
指先に物体の硬軟を提示するため様々なデバイスが開発されているが,接触時の力と面積が独立して制御されておらず動的な硬軟表現が困難である. 本研究では様々な物体の硬軟を表現するため,モータの駆動により力を表現し,空気量により面積を提示するエアバッグを備えた装置を組み合わせることで接触力と接触面積の特性を再現可能なデバイスを開発する. 理論モデルより導出した面積と力の曲線(A-F曲線)を目標値として提示デバイスより表現されるA-F曲線の再現性を確認する実験を行い,一様な弾性係数モデルにおいてA-F曲線が再現可能であることが示唆された.また,提示デバイスが表現できる範囲内において,動的に弾性係数を変化させた理論モデルに対してもA-F曲線を再現可能であることが示唆された.
-
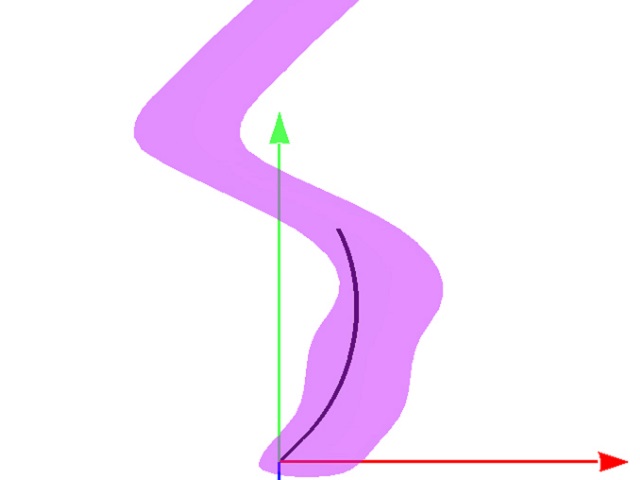
3次元固視位置を用いた視線自動較正

視線計測器を利用するには,事前に使用者がマーカを注視する能動的な動作による較正が必要である. これまで,いくつかの自動較正手法が提案されたが,視界画像の顕著性マップを用いる手法では計算コストが高く,シーンモデルを用いる手法では平面ディスプレイに限定されるという問題がある. 本研究は,VR環境下において,顕著性マップを用いず,平面ディスプレイに限定されない視線計測器の自動較正手法を提案する. 提案手法は,使用者が頭部を自由に動かすことが可能で,視点移動中に起こる固視の注視点が物体表面上で密集するという仮定に基づく. まず固視を検出し,その後,固視中の注視点群の分散に関する評価関数を最小化することで較正パラメータを推定する. 実験では,連続かつ滑らかな仮想曲面に対する視線情報を用いて,提案手法が従来法と同程度の精度(約1 deg)で較正可能であることが分かった.
-
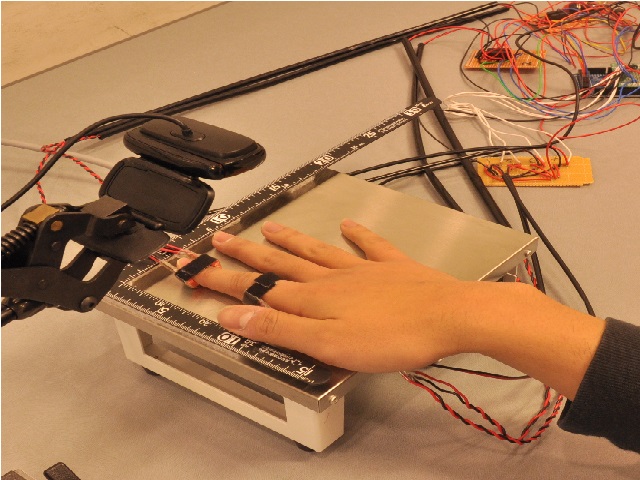
接触形状に基づく剪断力提示
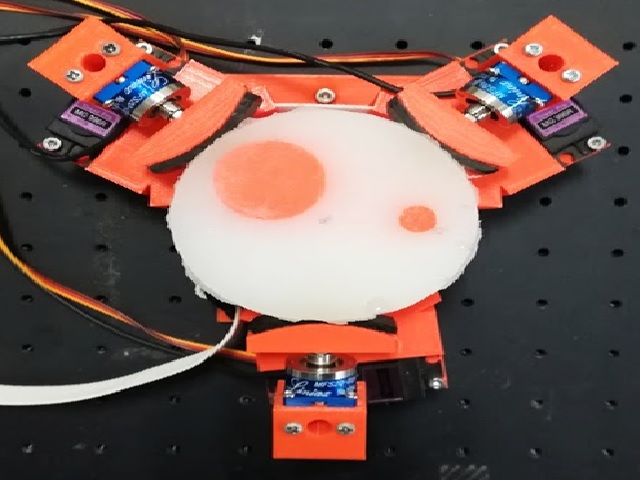
近年,機械の扱う対象は硬い物体のみならず,柔らかい物体も含まれている.しかし,硬さ分布を有した柔軟物に剪断力を与える際,滑りが発生し,力を正確に伝えることができない.本研究では,三つの末端効果器をサーボモータで駆動することによって硬さ分布を有する弾性体(足首ファントム)に剪断力を与える装置を開発する.三つの末端効果器の回転方向によって並進運動と回転運動を提示することが可能となる.また,末端効果器の曲率半径を変化させることによって,滑りの影響を抑えることを目指す.足首の硬さ分布においては,曲率半径を 40 mm から60 mm へ大きくすることで,滑りの影響が小さくなることが示唆された. [Omori 2019]
-
視線駆動型顕微視力拡張システム
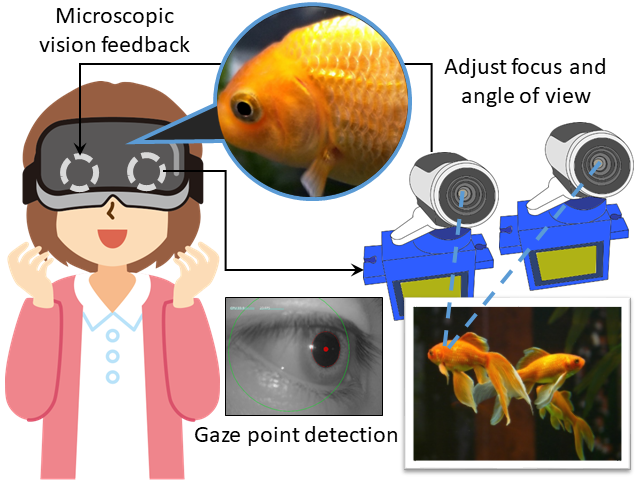
眼の限界を超えた視覚能力を実現する視覚拡張システムが次世代の支援器具として期待されている.視線の方向は対象を見ようとする意図を表す情報であり,注視位置の深度を推定し対象を識別することで,ユーザの注意する対象を抽出できる.このようなユーザの意図を反映する視覚インターフェイスを顕微観察に適用し,視線から注視対象を判定し自動でピントや画角を調整する顕微視力拡張システムを提案する.システムには,HMD内に視線方向を検出する眼球計測用カメラと,顕微観察を行うステレオカメラを搭載する.眼球計測用カメラを用いてHMDの視野内における注視位置を推定し,ステレオカメラにより得られる映像内の深度情報と組み合わせて注視対象を識別する.得られた注視対象の位置に合わせてステレオカメラの画角や焦点を制御し,その映像を実時間でユーザに提示し顕微視力を拡張する.
-
熱噴流工学に基づく瞬時冷却モデル
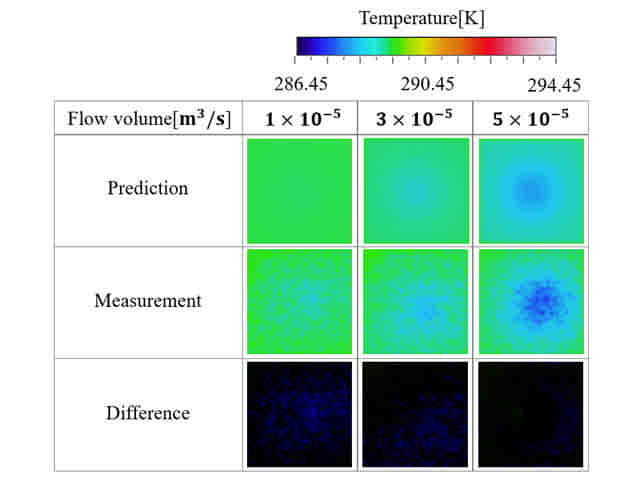
近年,非接触で物体を冷却する技術が発展している.しかし,冷却効果は大きくないという問題が残っており,物体を予測通りに瞬時に冷却することは困難である. 本研究では,物体を予測通りに瞬時に冷却するため,ボルテックスチューブを用いて生成する冷気流を利用することによって冷却した時の物体温度を推定できるモデルを提案する. 物体に冷気を輸送することによって衝突噴流を発生させ,物体を瞬時に冷却する.衝突噴流の伝熱特性を考慮するうえで,伝熱過程を簡略化することで,物体の温度分布を推定できる冷却モデルを構築する. 誤差が0.36 K以内でシリコンシートの温度分布を予測することができることが示された.
-
接触力と接触面積の実計測データを再現する硬軟提示装置の開発
触覚提示において様々な研究・開発が行われているが,硬軟提示においては接触に関わる物理量の表現が限定的であり技術的課題が多く残る.本研究では,様々な硬軟物体を表現するため,接触に伴う物理量である接触力と接触面積を再現する提示装置を開発する.実物体の変位に伴う接触力と接触面積を計測し,DCモータを用いた接触力の表現と,空気量により形状を変化させるエアバックを備えた装置を用いた接触面積の再現を行う.接触力と面積の独立した制御を行うことでそれぞれの物理量の特性を再現し,様々な物体の硬軟を表現を可能とする.
-
磁気式力覚ディスプレイ
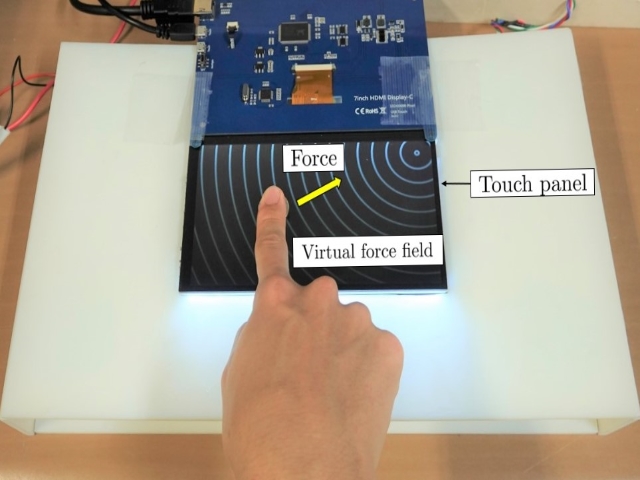
仮想物体に触れた際に,視覚や聴覚のみでなく,力触覚フィードバックを与えることで,仮想物体とのインタラクションが向上する.本研究では,磁気を用いた力覚提示装置を開発した.視覚情報の提示とユーザの指の座標を取得するためにタッチパネルを用いた.タッチパネル背面に設置した電磁石を用いて磁場を生成し,ユーザの指先に装着した永久磁石に力を作用させる.また,タッチパネルの任意の位置で力覚提示を行うために,ユーザの指の位置に応じて電磁石を移動させる.検証の結果,電磁石に流す電流によって,ユーザに提示する力を制御できることが示唆された.
-
自動追尾型エアジェット
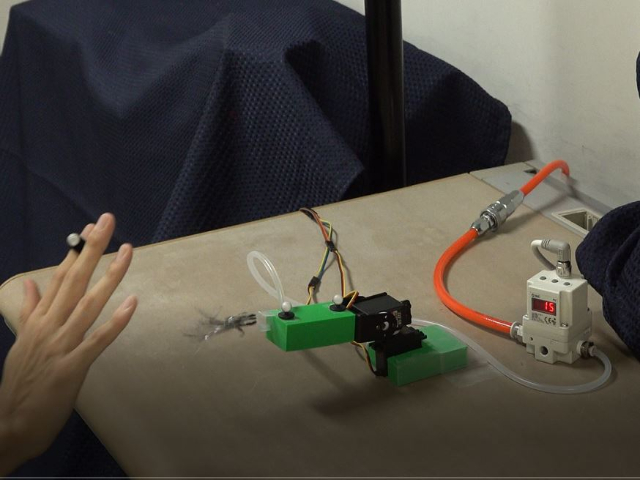
本研究では,ユーザの動きを自動追尾し,空間上の任意の位置に空気を噴射する装置を開発した.空気を噴射するノズルを二つのサーボモータを用いて回転させることで空間上の任意の位置に空気を噴射する.二つのサーボモータにより回転させる角度は,運動学により導出した.実験では,既知の回転角度により導出した任意の位置を作製したシステムに入力し,回転角度を逆算し評価した.地面と水平に回転するサーボモータの回転角度の誤差の平均値は 14.82 degであり,地面と垂直方向に回転するサーボモータの回転角度の誤差の平均値は 3.411 degであった.これより地面と垂直方向の回転角度は誤差が小さくの精度は高かったが,水平方向の回転角度の誤差が大きく精度は低かった.また提案システムにより動作速度に応じて誤差が生じるが,ユーザの動きに追尾すると同時に異なる力を提示することができた.
-
プロジェクタ光通信による触感伝送
映像とのインタラクション技術が発展してきた一方で,皮膚の広い範囲を対象とした多チャンネルの触感伝送技術には課題が残る.本研究ではプロジェクタ光通信により多数の振動子を独立に駆動させ,触感を再現する.プロジェクタ光を利用することにより,画素に応じた多数の信号の伝送が可能となる.投影光の輝度を時間的に変化させることで,任意の周波数の信号が伝送される.
-
触飛行体位置の PID 制御
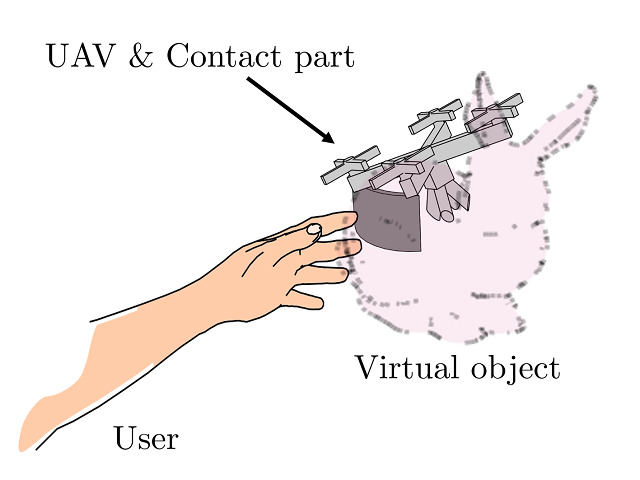
ユーザが仮想物体に触れる際に,その感覚を提示する装置の開発が行われている.ユーザに機器を取り付けることなく触覚提示する場合,提示可能な範囲が制限される.本研究では無人航空機の一種であるドローンを用いて,ユーザに機器を取り付けることなく広範囲に触覚提示可能な装置を開発することを目的とする.仮想物体とユーザの位置に応じてドローンの位置を制御し,ドローンに搭載された接触部位をユーザの指に押し付けることによって仮想物体の表現を行う.装置の開発に必要不可欠であるドローンの位置制御システムを実装した.システムに,今日多くの場面で用いられている PID コントローラを取り入れた.制御パラメータの最適設計を行い,ステップ応答を計測すると,立ち上がり時間1 sec未満かつ定常偏差10 mm未満の精度で位置制御を実現した. [Ikemoto 2018]
-
感覚輸送のための渦輪生成モデリング
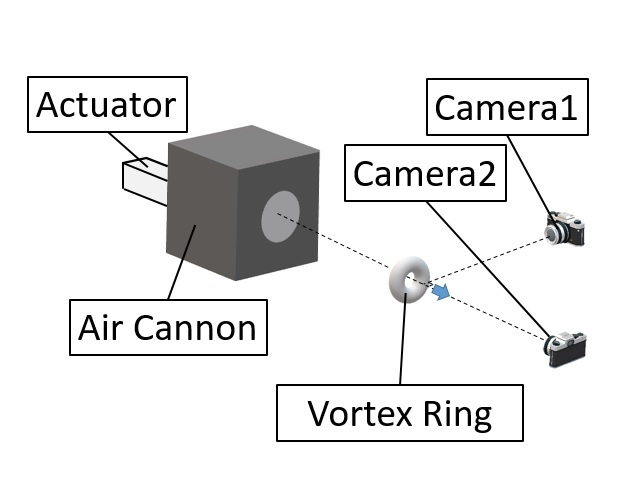
近年,感覚の輸送手段として渦輪を用いた研究が注目を集めている.渦輪を用いることで,離れた位置にいるユーザに流体を拡散させることなく届けることができる.一方で,空気中で気体を輸送する渦輪と生成条件を関係付ける数理モデルはまだ確立されておらず,所望の速度,大きさ,流体内包量の渦輪を生成し感覚を輸送するまでには至っていない.本研究では,渦輪のパラメータと生成条件との関係を実験的に明らかにし,両者を関係付ける数理モデルを構築することを目的とする.そのために,渦輪生成装置に与える変位を入力として与え,生成される渦輪のパラメータを,カメラを用いて計測し,入力との関係を近似式で表し数理モデルとする.計測結果を用いて,渦輪と生成条件との関係を,三次関数を用いて表せることを確認した.実験の結果に基づき,所望のパラメータを持つ渦輪を生成し,遠方まで空気中に拡散させずに感覚を輸送することができる.
-
煙霧体映写による物体アニメーション
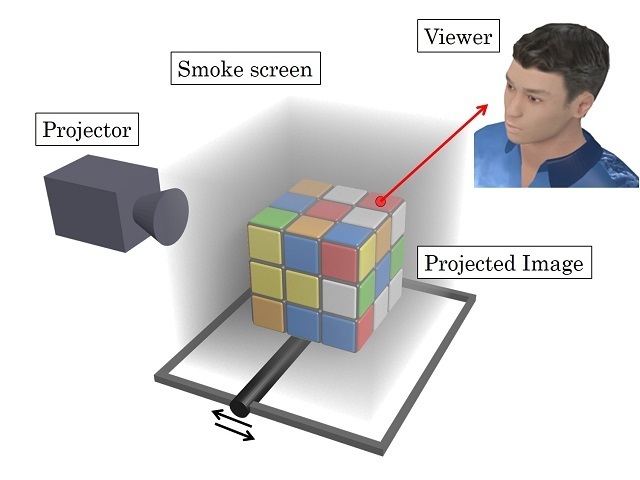
三次元空間上に立体映像を提示する技術に,対象物体から人の眼に届く光線の再現を行う研究がある.本研究では,提示した立体映像に対して任意の視点からの映像観察と直接指示が可能である空間立体映像提示システムを製作する.提示映像の任意の視点からの観察と映像への直接指示を可能とするために,スクリーンには入射した光を全方向に散乱させる特性を持つ煙霧体を用いる.煙霧体により平面形状のスクリーンを生成し,スクリーンを映像の投影方向に対して前後に往復運動させることで,三次元空間に映像を提示する領域を生成する.提示目的の映像を時空間分割した画像は,プロジェクタによりスクリーンの位置に応じて投影する.スクリーンの位置制御と提示映像の切り替えを人の知覚では認識できない速度で行うことにより三次元映像の提示を可能とする.
-
指先凹凸動態ディスプレイ
遠隔ロボットの操作など,仮想空間における物体操作支援のためにユーザに力触覚を提示する装置が開発されているが,従来の装置はユーザとの接触部の形状が不変であり,形状が動的に変化する物体の表現が困難であった.本研究では,ユーザの指腹部において物体形状を提示する触覚提示装置を開発した.装置は二次元に配列されたピンの変位を独立に制御することで形状を再現し,ユーザに提示する.ピンの移動を可能にするアクチュエータとして超音波リニアモータを使用し,センサ間干渉のない変位計測手法を提案することで,小型な装置を製作した. [Yamada 2018]
-
温覚 AR システム
現実の物体に仮想の感覚を重ね合わせることでユーザが受け取る情報を増強する技術をAR技術という.温覚におけるARとして現実の物体と接触しながら物体の内部情報と対応した温覚提示を受けることで情報を得ることが考えられる.しかし,温覚提示装置が現実の物体と皮膚との間に配置されることから,物体との接触が阻害され温覚ARは難しいと考えられた.この問題を解決するため,本研究では熱ファントムセンセーションを利用することで,指腹に温覚提示装置を接触させずに温覚提示を行うことを考えた.熱ファントムセンセーションは皮膚上の2点に熱刺激を与えたときに刺激点間に温知覚を得る熱錯覚現象で,刺激強度に差をつけることで温覚位置が刺激強度の強い方に偏るという特性がある.温覚位置を変化させ,温覚提示手法として用いることが可能か実験を行った.結果として,人差し指の近位-遠位方向において温覚提示が可能であることが確認された.
-
立体協調舞台プロンプタ
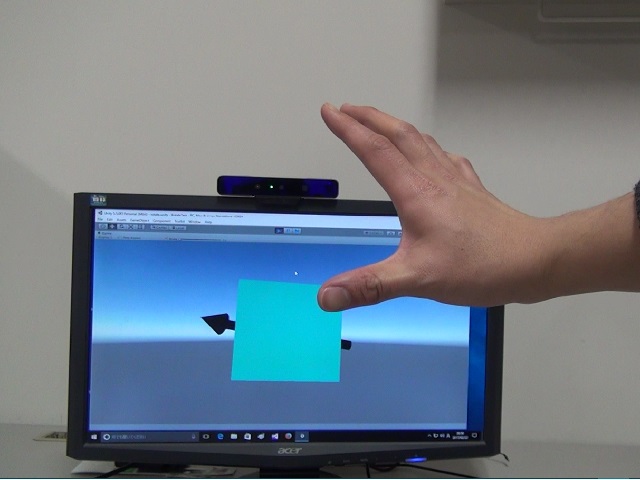
近年,コンピュータグラフィックスの進歩と共に仮想環境上で意思伝達などを行う機会が増加している.3Dユーザインタフェースは複雑な操作が必要であるなどの拘束が多く,より簡便な入力として手指でのジェスチャが注目されている.本研究ではデプスカメラを使用することで非接触的に人の手の指の関節位置などの認識を行い,認識された手の関節の相対位置からジェスチャを認識する.認識されたジェスチャに応じて仮想空間上にある物体を操作することで,習熟を必要としない簡便なインタフェースを構築することを目的とした.また,実験を行い,仮想環境上での意思伝達が可能であることを確認した. [Fukuda 2017]
-
風抗力によるナビゲーション
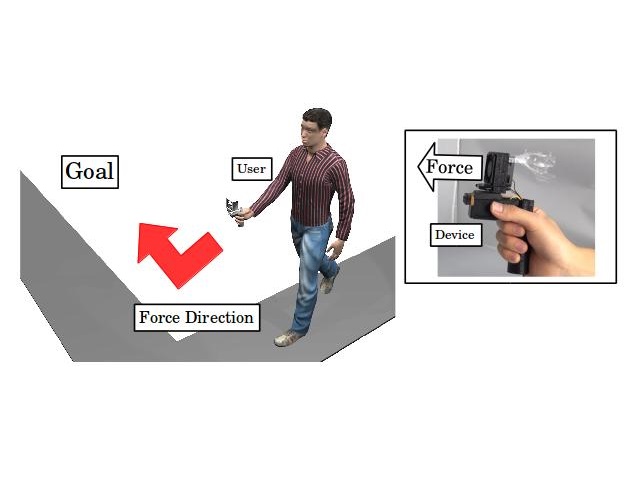
本研究では,人に引っ張るような力を提示することで直接目的地まで誘導することを可能にするために,人に方向を提示する装置を開発する. 自由に持ち運びができる装置にするために方向を提示するための力として風力の発生に伴う力を利用し,ユーザの手に力を加えることで方向を提示する.発生する力の方向をサーボモータで制御することによりユーザの力を感じる方向を切り替えて提示する方向を変更する.実験の結果,左右に対する方向提示が可能であることが確認できた. [Haraguchi 2015]
-
渡る世間は綱渡り
本システムは,バーチャル空間内での綱渡り体験を可能とする.ユーザはヘッドマウントディスプレイを装着し,台型のデバイス上を歩行する.高所に張った綱の上から見た映像をヘッドマウントディスプレイにより提示し,台型デバイスの振動により綱の揺れを提示する.バーチャル空間内で長い綱を渡る体験を限られた実空間内で実現するため,ユーザの歩行部分をベルトコンベア方式により循環させる.ユーザの位置を距離画像センサにより計測し,ユーザの位置に応じてベルトコンベアの回転速度を制御することで,ユーザは実空間内で一定の位置に留まって無限に歩行を続けることが可能である.
-
Oil Bubble Display

Oil Bubble Displayは水の上に浮かべた油(オイルバブル)に映像の投影を行い,オイルバブルを変形・結合・分離させることで,映像とのインタラクションを行うシステムである.オイルバブルに光を発散させる物質を混合することで,オイルバブルの形状や位置の計測と,オイルバブルへの映像の投影が可能となる.ユーザはオイルバブルを操作することで,オイルバブルに合わせて投影された映像や,オイルバブルに投影された色とのインタラクションを行うことができる.
-
波形観測に基づく液体のバーチャル化
大規模に変形する流体をシミュレーションする粒子法の一つにSPH(Smoothed Particle Hydrodynamics)法があり,映画やゲームなどのコンピュータグラフィックスに利用されている.より現実に則した流体をシミュレーションするためのパラメータ設定は,現実の物理量を代入するだけでは行えず,難しい.本研究では,液体のシミュレーションにおけるパラメータ設定を,実際の液体の挙動と多様なパラメータでのシミュレーションでの挙動とを比較することで行い,液体をバーチャル化する手法を提案する.本手法により,水とサラダ油それぞれに適した粘度と静止密度に相当するパラメータを取得し,各液体をバーチャル化することができた.[Takemura 2015]
-
フレーミングのためのRGB-D情報処理
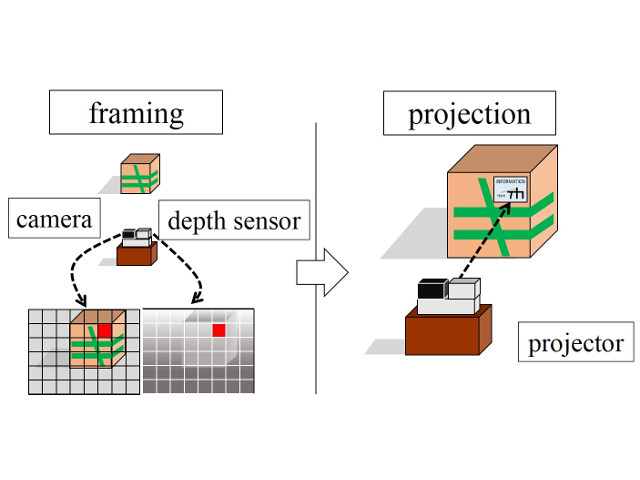
任意環境においてプロジェクタを用いた投影の際は, 屋内におけるスクリーンへの投影とは異なり, 特定の投影面が存在しておらず, 様々な形状, 色彩を有した物体が混在している. 平面かつ単色となる部分に投影することで視認性に富んだ投影・級ハが得られるため、そういった部分を投影面として選択する. また, 特定の投影面上に形の崩れていない投影を行わなければ視認性の富んだ結果が得られないため, プロジェクタの位置姿勢に応じた投影を行う. RGB-Dカメラからそれぞれ任意環境における三次元空間内の幾何情報および光学情報を取得, 評価を行うことで投影に適した面を選択し, プロジェクタの位置姿勢に応じた投影を行う. [Danbara 2015]
-
Haptylus: 操作空間等化スタイラス
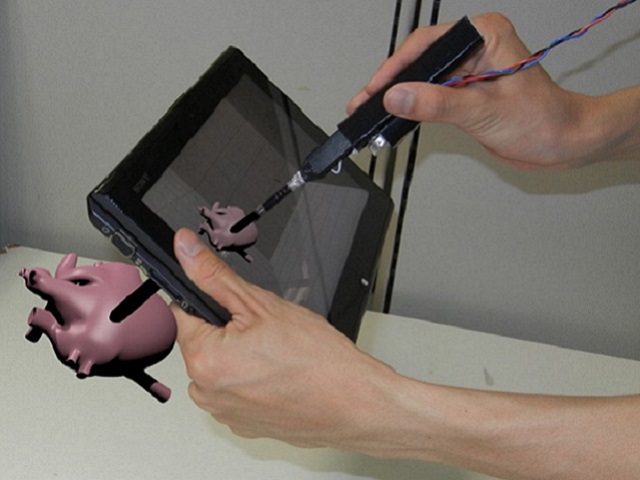
Virtual realityとは「人工的な現実感」を意味し,実際には物体は存在しないが,コンピュータを用いて物体が存在するかのような感覚を人に与える技術を指す.本研究では,伸縮かつ振動可能なスタイラスを用いてタブレットPCに表示された物体に触れている感覚をユーザに与えることを可能にしている.スタイラスには振動子とDCモータを取り付ける.振動子を振動させることでユーザは物体の質感を得られ,またDCモータでペンの伸縮を制御することで力覚を得られる.ユーザがペンをタブレットPCに向かって押し込むと,タブレットPCのディスプレイではタッチペンが入り込んでいるかのような映像を提示する.また,カメラでユーザの視点位置を計測し,ユーザの視点位置に応じた映像を提示する.ユーザは,ディスプレイにスタイラスを挿入した感覚を得ながら,タブレットPC内の物体とインタラクションを行うことが可能となる. [Nagasaka 2015]
-
Puppet-Tone
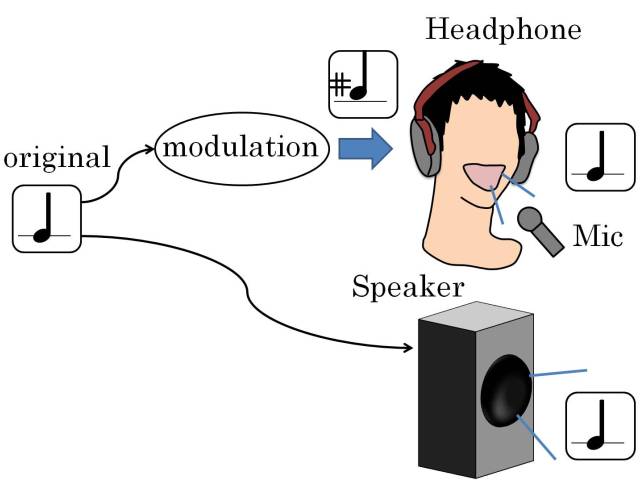
近年,カラオケの普及などにより一般の人が人前で歌う機会が急増している.特にカラオケなどでは,歌唱力はコミュニケーションに影響を与える要因であり,歌唱力向上を目指す人が多くおり,歌唱力を向上することが可能なシステムの開発が望まれている.人は歌唱する際に,伴奏音や周囲の環境音などに合わせて歌唱する.本研究では,歌唱者の音高のずれに応じた伴奏音を提示することにより,歌唱者の音高を操作し,歌唱力を向上させるシステムの開発を目指す.
-
身体性指向意匠造形
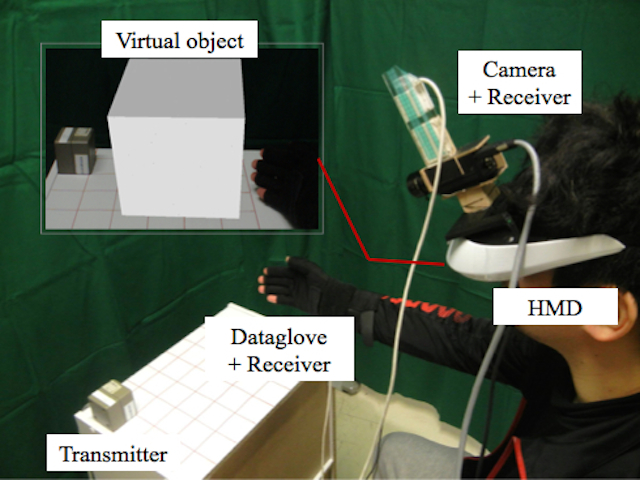
例えば, 粘土を手で変形させ造形することや, 指で模様を掘ることなど, 手を用いた造形手法はユーザの入力に対して出力がわかりやすくユーザの意図した造形を行うことができる. この様にユーザの入力に対して直接的な出力が行われることを身体性が高いと言う. また, 形状や模様といった意匠の造形において, 製作者の意図した編集を行えることが重要である. そのため, 本研究では頭部の移動によって物体の観察を行い, またユーザが手でバーチャルオブジェクトを編集するといった身体性の高いシステムを構築することにより, 意匠造形に適した3次元モデリングデバイスを目指した.
-
カテーテル手術・ノ向けた力覚AR
本研究では,患部に至るまでの血管は実物の血管模型で表現し,頭部の病変部の血管は仮想血管をコンピュータ内で作製する.患部以前の血管とガイドワイヤとの接触力は血管模型によって提示し,ガイドワイヤシミュレーションによって算出した,ガイドワイヤモデルと血管モデルとの衝突反力は力覚提示デバイスを用いて提示し,模型による提示反力と力覚提示デバイスによる提示反力を統合してユーザへ提示する.また,ガイドワイヤモデルは,エンコーダにより計測された侵入長に応じて,仮想空間の血管内に進行させ,画面にCGとして表示した。また,力覚提示デバイスは,モータと糸によって力を二自由度に提示する.本システムにより,汎用性が高く計算コストの低いカテーテル・Vミュレータを構築することができた.
-
作業段階重畳型機器操作誘導
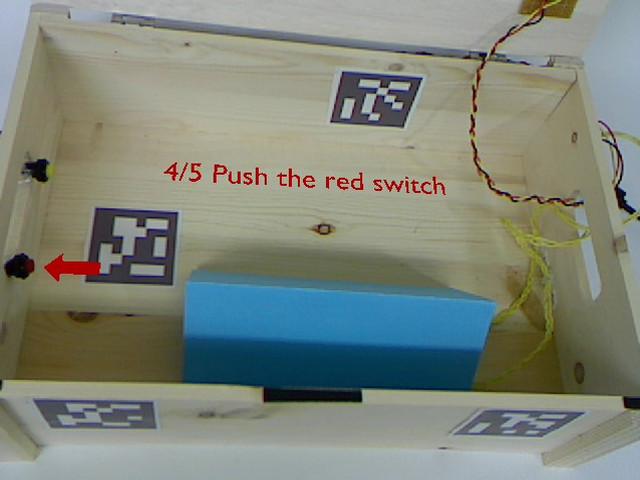
本研究では,センサを設置した対象機器の状態をシステムが常に把握することで,現在の作業段階や操作箇所,操作方法を作業者に提示し,さらに誤作業が行われた場合に直ちに間違いを修正させるマニュアルを構築することで,誤った状態で作業が進行することを防ぐシステムを提案した.実装では,プリンタを模した箱を対象に,可動部部分の蓋の開閉状態を,加速度センサを用いて検出した.また,適切な種類の紙が正確な向きで設置されているか否かの確認として,近接センサであるリードスイッチを用いた. [Wakita 2014]
-
触覚重畳による道具操作支援
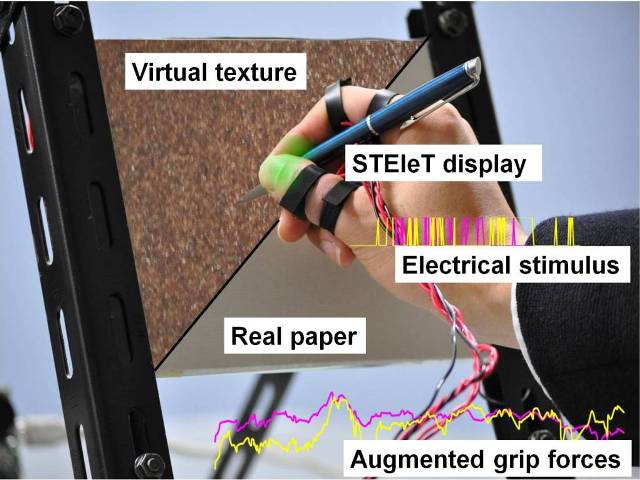
示指と拇指で把持する道具の操作においては,指腹部の触覚が物性の知覚や操作状態の理解に影響する.外科手術をはじめ様々な道具操作において,指腹部への触覚重畳によって操作の状態を通知することで,手技の効率や精度が向上すると考えられる.本研究では,繊細な道具の操作に利用可能な,・・[ザビリティの高い触覚提示装置を開発し,実際の手技に応用することを目的としている.従来の触覚提示技術では,触覚を感じる部位と刺激装置を設置する部位が同一であったため,道具の把持や指の操作が妨害されてしまう.一方で本研究では,刺激部位に対して触覚のズレを発生させることが可能な空間透明型電気触覚ディスプレイ“STEleT display”を提案する.特に神経の解剖学的構造と人体の電気的な特性に注目することで,指中節への電気刺激が十分なユーザビリティと触覚提示機能を与えることを導いた.ペン型の道具によるなぞり操作において,仮想的に定義された危険領域への侵入回避に用いたところ,目視できない・オ下においても危険領域への侵入回避が可能であることが確認された. [Yoshimoto 2010]
-
多機能歯科情報のための可触化環境構築
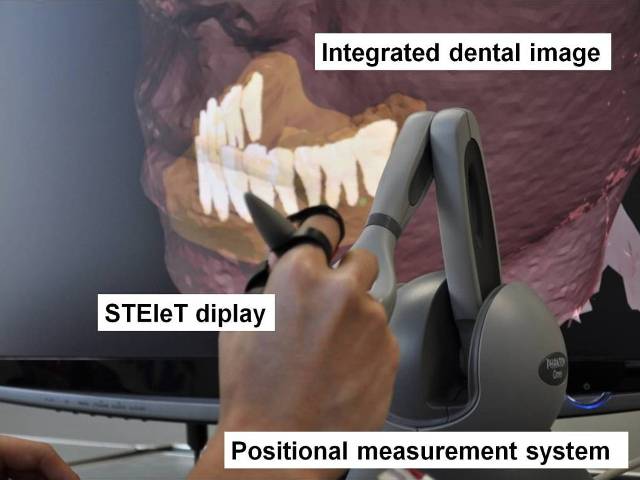
X 線CT やMRI など複数のモダリティの画像を統合し・Cさらに,ユーザがインタラクティブに操作できるものを多機能画像と呼ぶ.歯科領域をはじめとし,多機能画像の効果的な提示方法には課題が残る.本研究では触覚提示技術を利用した新しい情報提示方法を提案し,体内外の多機能な情報を空間の指示操作により理解可能な可触化システムの構築を目指す.可触化の手法として,三次元歯科形状データ,パノラマ画像,顔形状データを同一の仮想空間上に統合し,解剖学的な情報が投影されたボクセル情報を生成する.触覚提示は指示操作の邪魔にならない,かつ多自由度な情報提示が可能な空間透明型電気触覚ディスプレイを用いて行う.ユーザは指示操作によって指示具を持つ指に解剖学的情報に応じた触覚を知覚することができる.本システムは歯科における診断や,解剖学的構造の学習における新しい情報提示方法として有効性が期待される.
-
多元的歯列情報の融合
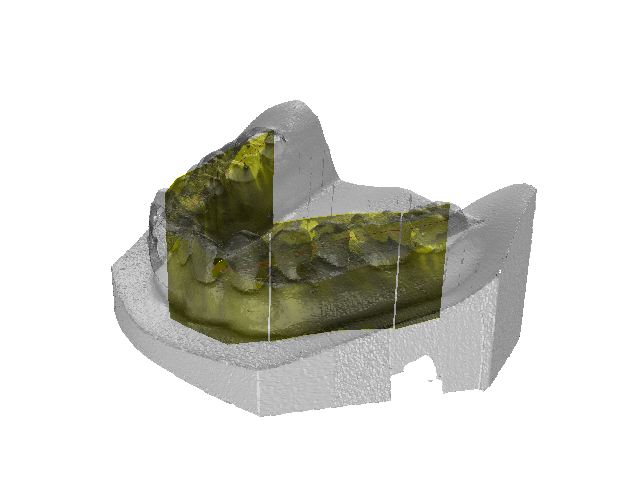
口腔模型を三次元形状計測により計算機内に取り込み,計測された三次元モデル上の歯列位置にパノラマX線画像を投影することで内部情報を付加した歯列三次元情報の提示を行う.形状計測された口腔模型では,歯列と歯茎の識別を行うことが困難であることから,本研究では,口腔内画像から色情報に基づいて各々の歯列部を抽出し,三次元形状データ上に逆投影を行うことで歯列位置を決定する.続いて,パノラマX線画像の画像処理によって得られる各々の歯根の像を,歯列の位置情報が得られている三次元形状データ内に投影する.実験により三次元歯列形状に対し,パノラマX線画像を投影することにより,内部情報を有する・O次元形状情報が提示できることを確かめた. [Shigeeda 2011]
-
歯列パノラマ断層画像と表面形状情報の統合による擬似的三次元歯列形状情報の構成
本研究では,口腔情報の可視化を目的として,・pノラマ断層画像が持つ歯列形状情報と,口腔模型から得られる表面形状データを統合し,同一空間へ投影することで,顎骨内部の歯根情報を含む三次元歯列形状データを擬似的に構築する手法を提案する.提案手法は,表面形状データから仮想的なパノラマ画像を作成し,取得されたパノラマ画像との一致度を歯の幅に基づく評価関数によって評価することで,パノラマ画像の最適な投影面を決定する.決定した投影面に対してパノラマ画像をマッピングすることにより,両者の同一空間への統合を実現する. [Kaga 2009]
-
形状記憶合金の変位制御による触覚タッチパネル
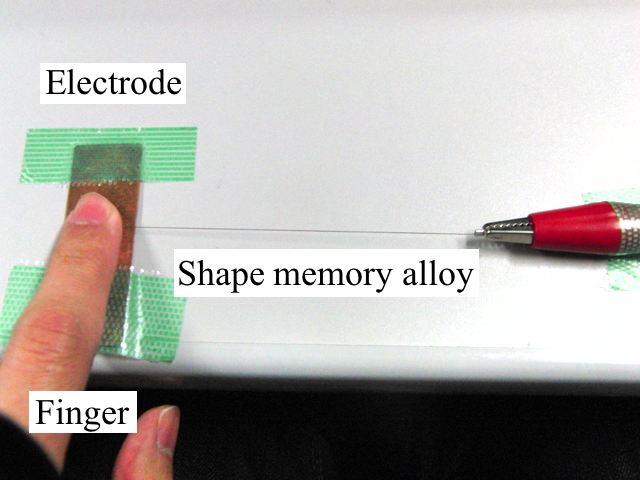
ヒトは物体に触れた際に,物体の表面の粗さ,凹凸などの触覚を知覚する.VRにおいて物体表面の質感を提示する方法には電気的刺激や機械的刺激が存在する.しかし,電気的刺激は皮膚変形を伴わず,機械的刺激に用いられる超音波振動子などのアクチュエータは駆動可能な変位が小さく,皮膚変形による圧覚と振動覚の同時提示は困難であり,実現していない.本研究では,形状記憶合金を用いた皮膚変形と振動覚の同時提示可能な触覚ディスプレイを制作することを目的とする.形状記憶合金の長さを PWM を用いて変化させることで振動と変位を生成する.ワイヤ状の形状記憶合金をスライダに接続し,形状記憶合金に張力を加えることでスライダ上に触覚を提示可能とした.検証実験として,PWMに用いる周波数とパルス幅をそれぞれ変化させ,振動が生成出来ることを確認した.
-
視触覚融合タッチパネル
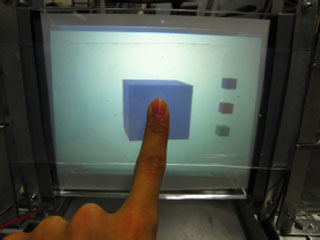
本研究では,映像の提示部と押し込んだ時の硬さを表現する力覚の提示部を一体化した視触覚融合タッチパネルを開発する.ユーザが映像提示タッチパネルに触れ,押し込んだ場合に,押し込んだ力に応じて接触面積を変化させることによって硬さを提示する.指先の接触面積と反力の関係は,接触面積が決定すれば反力が決定するが,タッチパネル表面の張力を変化させることで等しい反力の時に様々な接触面積に変化させる. [Shigeta 2010]
-
電気刺激パターンによる触覚生成
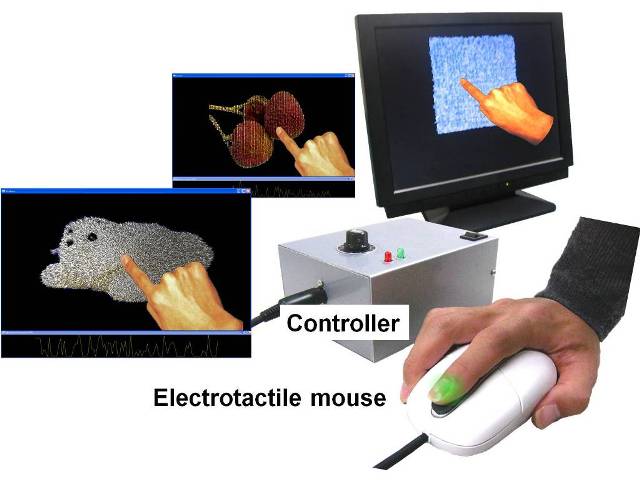
われわれ人間は指で"もの"に触れることで触覚を感じることができる.一方でマウス等に代表されるユーザインタフェースの操作は,仮想的な指による"もの"の操作に相当すると考えられる.ユーザインタフェースの操作に応じた触覚を提示することは,対象の認識率や操作精度の向上に有効であると考えられる.本研究では,人工的な質感提示が可能な小型の触覚提示装置の開発に焦点を当て,電気刺激を利用した触覚の生成方法を提案する.特に任意形状の物体表面のなぞり操作における皮膚変形を特徴化しパル・X刺激の周期に反映させることで,一つの陽極刺激電極のみによる質感の表現を可能にした.質感提示の一例として数段階の粗さを有する仮想物体の探索に関して被験者実験を行ったところ,ユーザは仮想物体の形状に応じた粗さの知覚が可能であることが示唆された. [Yoshimoto 2009]
-
ダイラタント流体を用いた力触覚提示システム
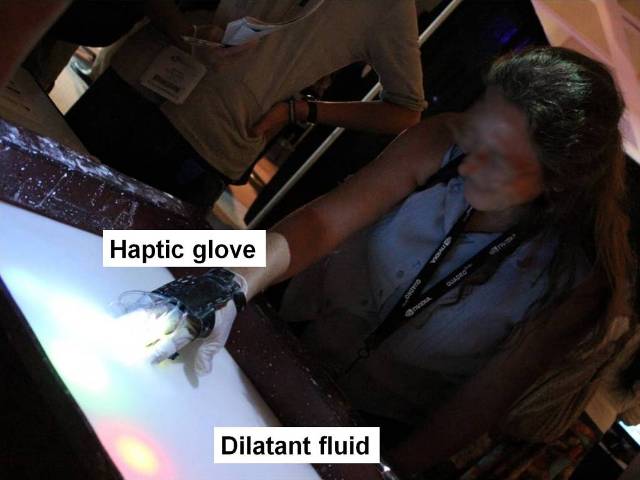
水と片栗粉の懸濁液,ダイラタント流体は外力に応じて固液間の可逆的な変化を示し,力触覚のエンタテインメントを提供する.このダイラタント流体にみられる触覚インタラクションから,ユーザが自由に力触覚の生成・調合が可能なシステムは力触覚の本質的な機能を解明するために有効であると考えられる.本研究では,ダイラタント流体を意図的に制御することで複合的な力触覚を可能にすることを目的として,ダイラタント流体の濃度制御を利用した感覚提示法を提案する.特に,片栗粉粒子のフィルタ及び水の吸入出機構を備えたグローブ型の力触覚提示装置によって流体の状態を制御可能とした.状態が変化した流体の物性に応じて,ユーザは様々な感覚を体験可能である.提案する力触覚提示装置を用いた体験の実施によって,“粘着感”,“硬さ感”,“粗さ感”が提示可能であることが確認された.さらに因子分析の結果,ダイラタント流体を用いた力触覚提示装置によって表面形状・粘性・剛性の三つに相当する物質の物理量を制御可能であることが示唆された.
-
多視点観察可能なフォグディスプレイ
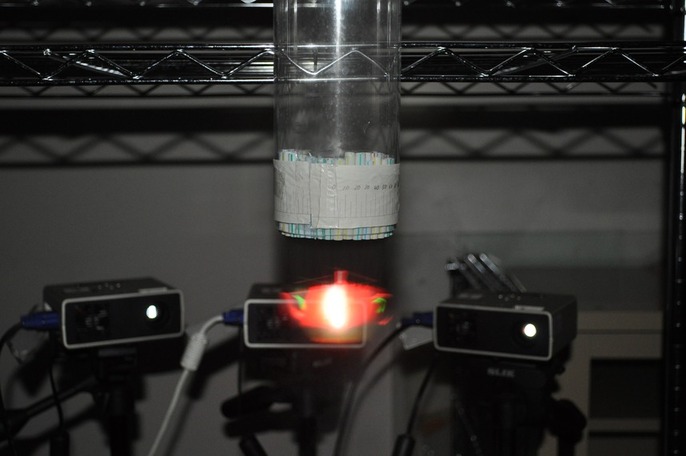
映像表示技術のひとつに空間映像技術がある.空間映像とはスクリーンの存在が希薄に感じられ,空間に映像そのものが存在しているように見える映像システムを指す.空間映像技術においては,画枠が無いなどの性質によって 2D映像を表示しても立体的に見える.空間映像技術のひとつにフォグディスプレイがある.本研究では,観察者の位置に応じた映像が観察できる円筒型フォグディスプレイを製作する.超音波式の霧生成装置で発生させた霧を,円筒形に噴・oさせたフォグスクリーンに,複数の位置からプロジェクタで映像を投影する.霧は光を前方に強く散乱させるため,観察者の真正面以外から投影された映像は観察出来ない.従って,複数の位置から映像を投影することで,観察者の位置に応じた映像が観察でき,観察者が視点を移動させると運動視差が生じ,立体感が得られる.投影映像はプロジェクタの位置や姿勢に応じて補正した. [Yagi 2011]
-
人体形状のアフォーダンスを利用した体内情報閲覧システム

本研究では,実物大の人体型スクリーンを用いた生体情報の提示環境を構築する.提案システムは,プロジェクタで情報を投影する投影型Mixed Realityディスプレイであり,スクリーンの形状的特徴を利用し,直感的な情報理解を促す.適切なアフォーダンスを提供する押し込み操作,デバイス操作という二種類の操作によって体内情報を閲覧することができる.
-
気泡運動を反映した液体のCGと効果音のリアルタイム生成

映像と同期した効果音はバーチャル空間のリアリティの向上に有効である.本研究では,液体のリアルタイムコンピュータグラフィックスに効果音を自動的に付加する手法を提案する.液体の発する音は液体中の気泡の運動に起因することに注目し,粒子ベースのリアルタイム二相液体シミュレーションによって液体と気泡の運動を計算する.気泡の生成・破裂に合わせてあらかじめ録音して・ィいた基本となる音を変調・合成して出力することにより効果音の自動生成を実現する.